Configuration
7-62
48XX/49XXSHB0399
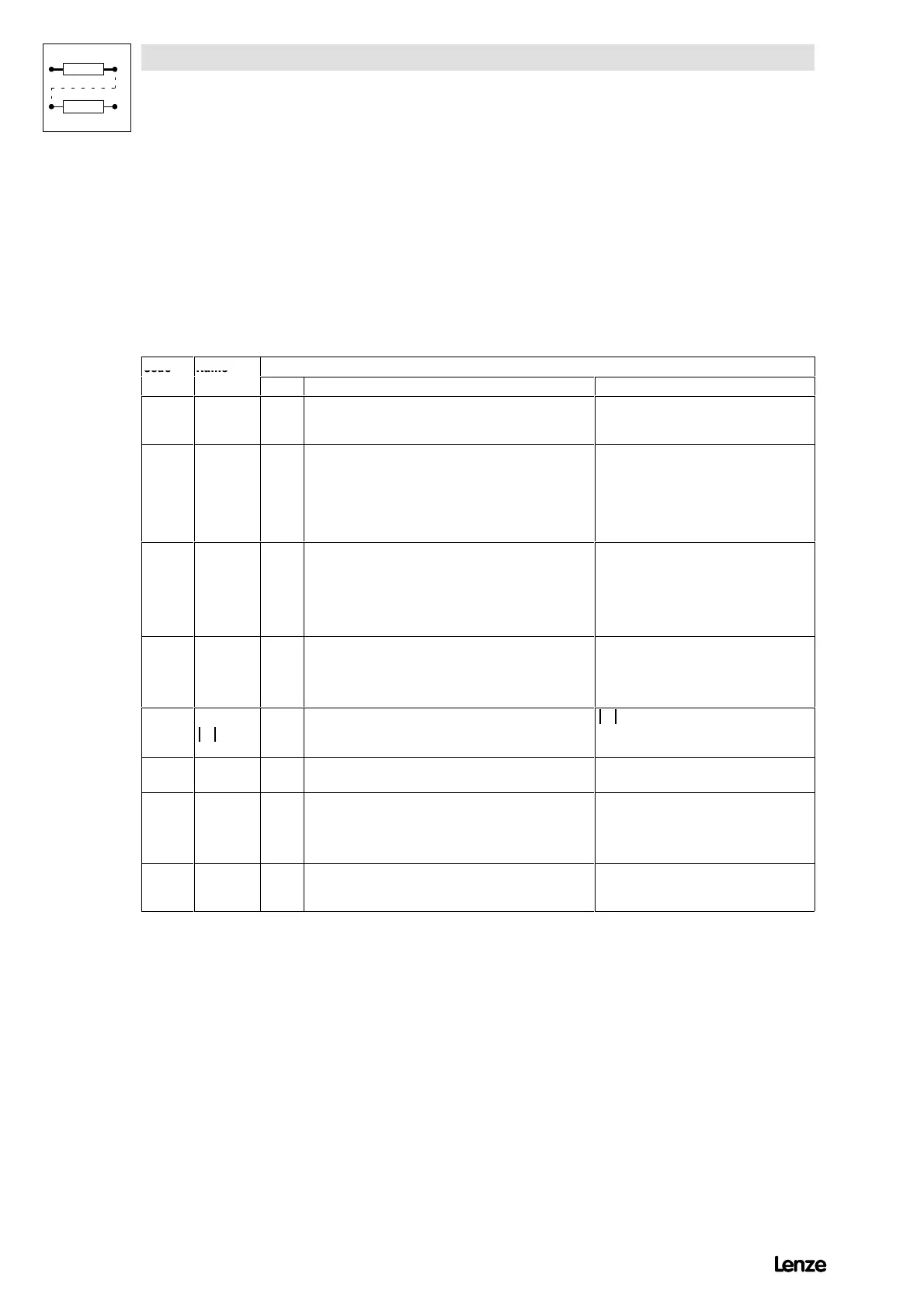
7.4.5 Control of a holding brake
Purpose
Control singal for holding brakes in:
( hoists
( travelling drives
( active loads
Code Name
Possible settings
Lenze Selection Info
C019* Threshold
n
act
=0
50 rpm 0 rpm {1 rpm} 5000 rpm If the acutal speed falls below the
threshold, the corresponding output will be
activated.
C195* Delay
between
’engage
brake’ and
controller
inhibit
9999 s 0.00s {0.01 s} 1s
1s {0.1s} 10s
10s {1s} 250s
9999 s
Delay between signal ’engage brake’ and
automatic controller inhibit
9999 s:
Unlimited delay, controller will not be
inhibited.
C196* Delay
between
’setpoint
integrator
free’ and
quick stop
0.00s 0.00 s {0.01 s} 1 s
1s {0.1s} 10s
10s {1s} 100s
100s {10s} 250s
Delay between reset of the quick stop
function and enable of the main setpoint
integrator
[C197*] Sign of the
torque
selection
0 -0- Sign is determined by the torque setpoint
-1- positive sign
-2- negative sign
Sign of the torque selection between reset
of QSP and enable of the setpoint
integrators
C244* Threshold
I
A
>I
x
10% 0%I
Amax
{0.1% I
Amax
} +100 % I
Amax
I
A
>I
x
Reference, rated controller current
(armature)
C245* Threshold
I
F
>I
x
10% 0%I
Fmax
{0.1% I
Fmax
} + 100 % I
Fmax
I
F
>I
x,
Reference, rated controller current (field)
C317* Time delay
for the
reduced
field current
60 s 0.0 s {0.1 s} 10 s
10 s {1 s} 100 s
100 s {10 s} 3600 s
Time which is required to activate the
reduced field current after inhibiting the
controller.
C318*¤ Activate
field current
reduction
0 -0- Field current reduction function is off
-1- Field current reduction function is switched on
The function for the control of a holding brake only makes sense with the
configurations C005 = -1X- and -5X-. The brake control is always derived from the
QSP function.

 Loading...
Loading...


