9300 Servo PLC
System blocks
2.7 DCTRL_DriveControl
2-21
L
ServoPLC EN 2.0
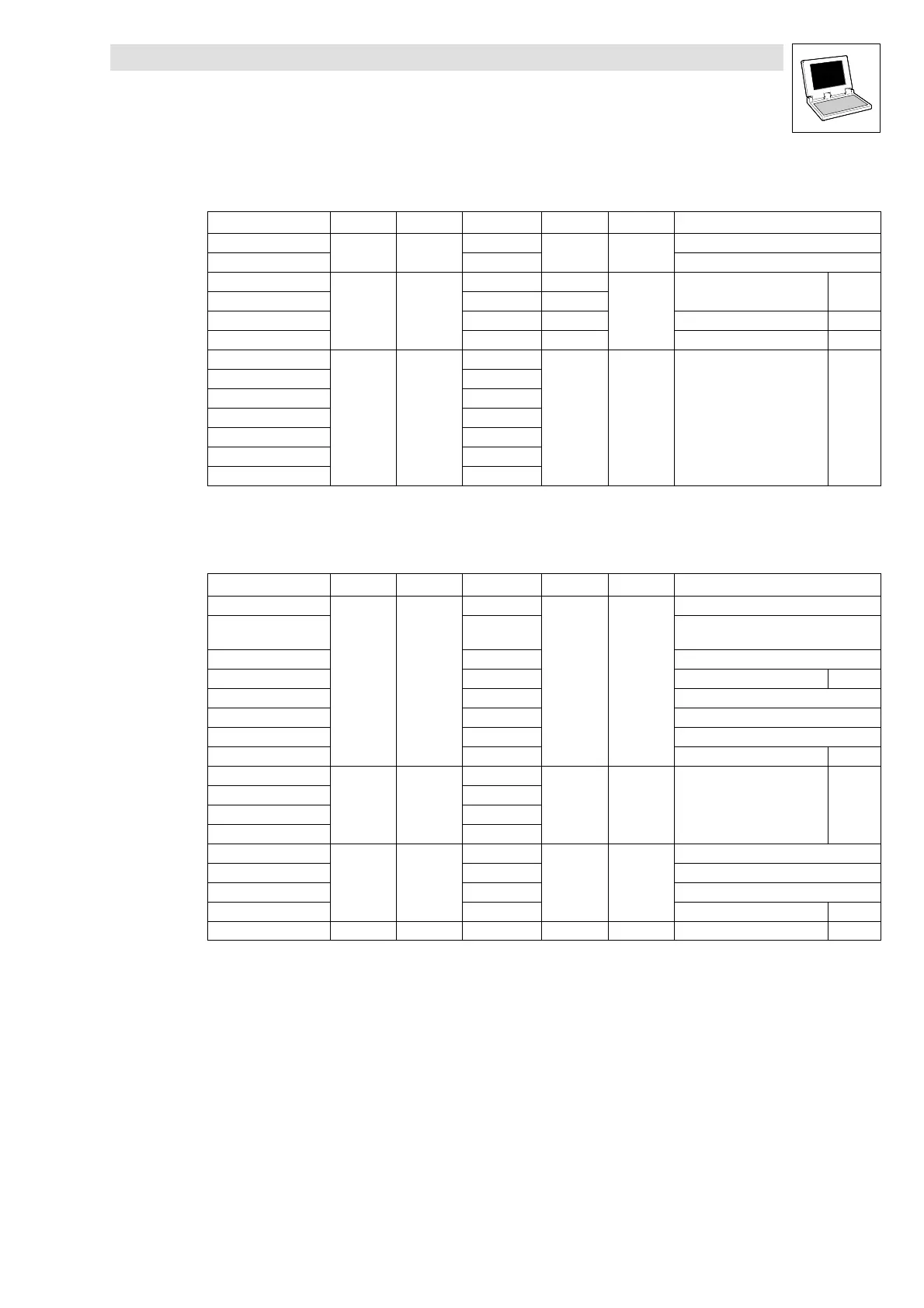
2.7.1 Inputs_DCTRL
VariableName DataType SignalType Address DIS DIS format Note
DCTRL_wCAN1Ctrl
%QW121.3 CAN control word
DCTRL_wAIF1Ctrl
Word
%QW121.2 Control word AIF
DCTRL_bCInh1_b
%QX121.0.1 C0878/1
DCTRL_bCInh2_b
%QX121.0.2 C0878/2
Con
roller inhibi
^ 2-22
DCTRL_bTripSet_b
Bool binary
%QX121.0.3 C0878/3
bin
TRIP-SET ^ 2-23
DCTRL_bTripReset_b
%QX121.0.4 C0878/4
TRIP-RESET ^ 2-23
DCTRL_bStatB0_b
%QX121.1.0
DCTRL_bStatB2_b
%QX121.1.2
DCTRL_bStatB3_b
%QX121.1.3
DCTRL_bStatB4_b
Bool binary
%QX121.1.4
Status signals ^ 2-24
DCTRL_bStatB5_b
%QX121.1.5
DCTRL_bStatB14_b
%QX121.1.14
DCTRL_bStatB15_b %QX121.1.15
2.7.2 Outputs_DCTRL
VariableName DataType SignalType Address DIS DIS format Note
DCTRL_bFail_b %IX121.0.0 TRUE = active error
DCTRL_bImp_b %IX121.0.1 TRUE = power output stage is
high-impedance
DCTRL_bTrip_b %IX121.0.2 TRUE = active error
DCTRL_bQspIn_b
Bool binary
%IX121.0.3 TRUE = QSP ^ 2-22
DCTRL_bRdy_b
%IX121.0.4 TRUE=readytooperate
DCTRL_bCwCCw_b %IX121.0.5 FALSE = CW, TRUE = CCW
DCTRL_bNActEq0_b %IX121.0.6 TRUE = motor speed < C0019
DCTRL_bCInh_b %IX121.0.7 TRUE = RSP ^ 2-23
DCTRL_bStat1_b
%IX121.0.8
DCTRL_bStat2_b
%IX121.0.9
DCTRL_bStat4_b
Bool binary
%IX121.0.10
S
a
us signals ^ 2-24
DCTRL_bStat8_b
%IX121.0.11
DCTRL_bWarn_b %IX121.0.12 TRUE = active warning
DCTRL_bMess_b
%IX121.0.13 TRUE = active message
DCTRL_bInit_b
Bool binary
%IX121.0.14 TRUE = Initialisation phase
DCTRL_bExternalFault_b %IX121.0.15 TRUE = External erro ^ 2-25
DCTRL_wStat Word - %IW121.1 C0150 hex Status word ^ 2-24
efesotomasyon.com - Lenze
 Loading...
Loading...




