9300 Servo PLC
System blocks
2.12 MCTRL_MotorControl
2-50
L
ServoPLC EN 2.0
2.12.14 Feedback system
Use the following codes to configure the feedback system for the position controller and speed
controller:
Code LCD
Possible settings
IMPORTANT
Lenze Selection
[C0420] Encoder const 512 Encoder: Constant for encoder input
X8
1 {1 inc/rev} 8192
[C0490] Feedback pos 0 Feedback system for the speed con-
troller
• C0490 = 0, 1, 2 can be mixed
with
C0495 = 0, 1, 2.
• C0490 = 3, 4 sets C0495 to the
same value.
0 Resolver at X7
1 Encoder TTL at X8
2 sin/cos encoder at X8
3 Absolute value encoder ST at X8
4 Absolute value encoder MT at X8
[C0495] Feedback n Feedback system for the speed con-
troller
• C0495 = 0, 1, 2 can be mixed
with
C0490 = 0, 1, 2.
• C0495 = 3, 4 sets C0490 to the
same value.
0 Resolver at X7
1 Encoder TTL at X8
2 sin/cos encoder at X8
3 Absolute value encoder ST (single turn) at X8
4 Absolute value encoder MT (multi turn) at X8
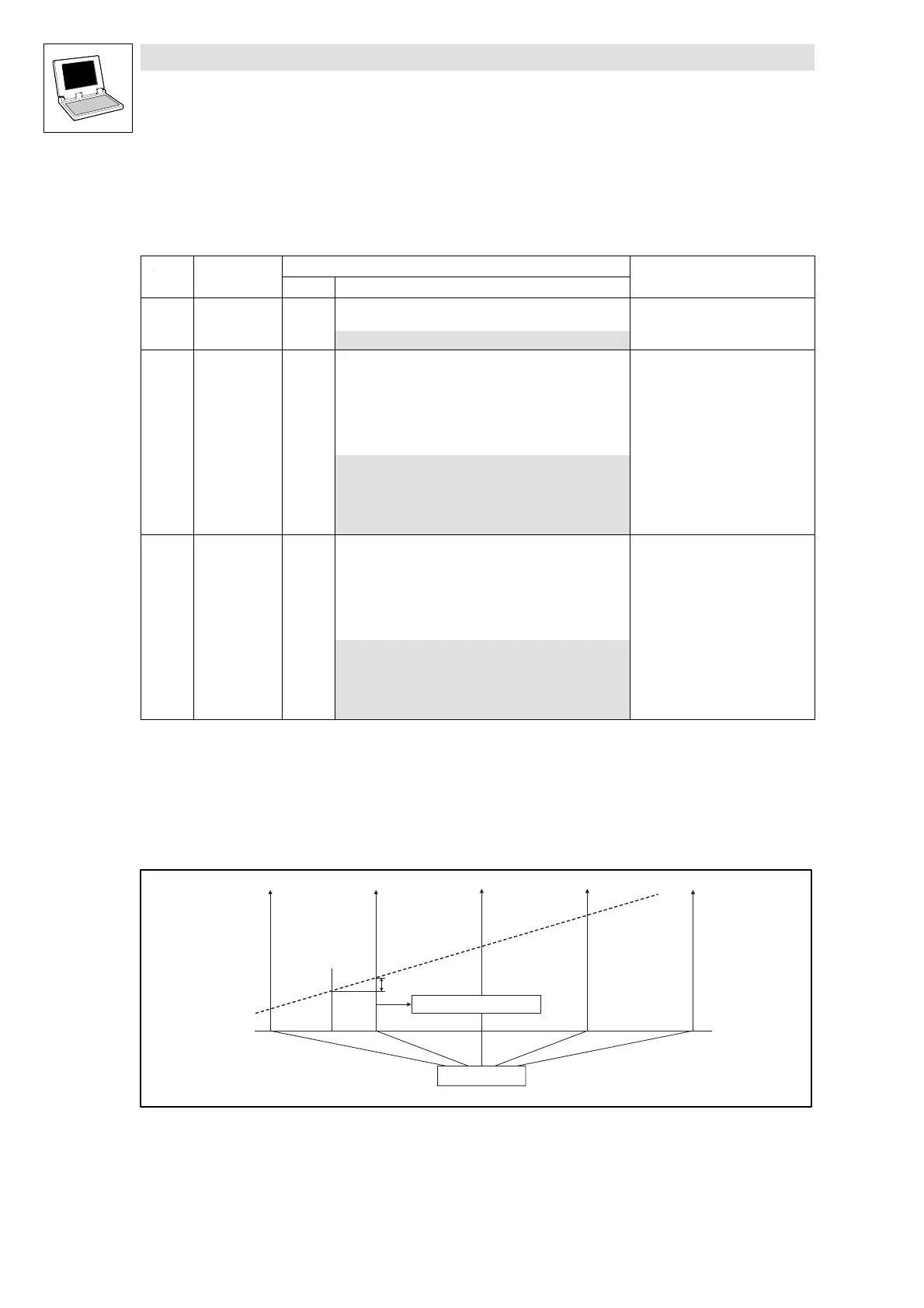
2.12.15 Touch probe (TP)
Process: The current angle value (digital frequency input value) is stored by a quick interrupt in the
operating system when a signal change occurs at the TP activating input (e.g. X5/E4).
MCTRL_dnActIncLastScan_p
TP
j
Fig. 2-25 Function diagram of a TP
Time-equidistant start of an interval-task
ϕ Phase-angle signal
efesotomasyon.com - Lenze

 Loading...
Loading...



