9300 Servo PLC
System blocks
2.12 MCTRL_MotorControl
2-41
L
ServoPLC EN 2.0
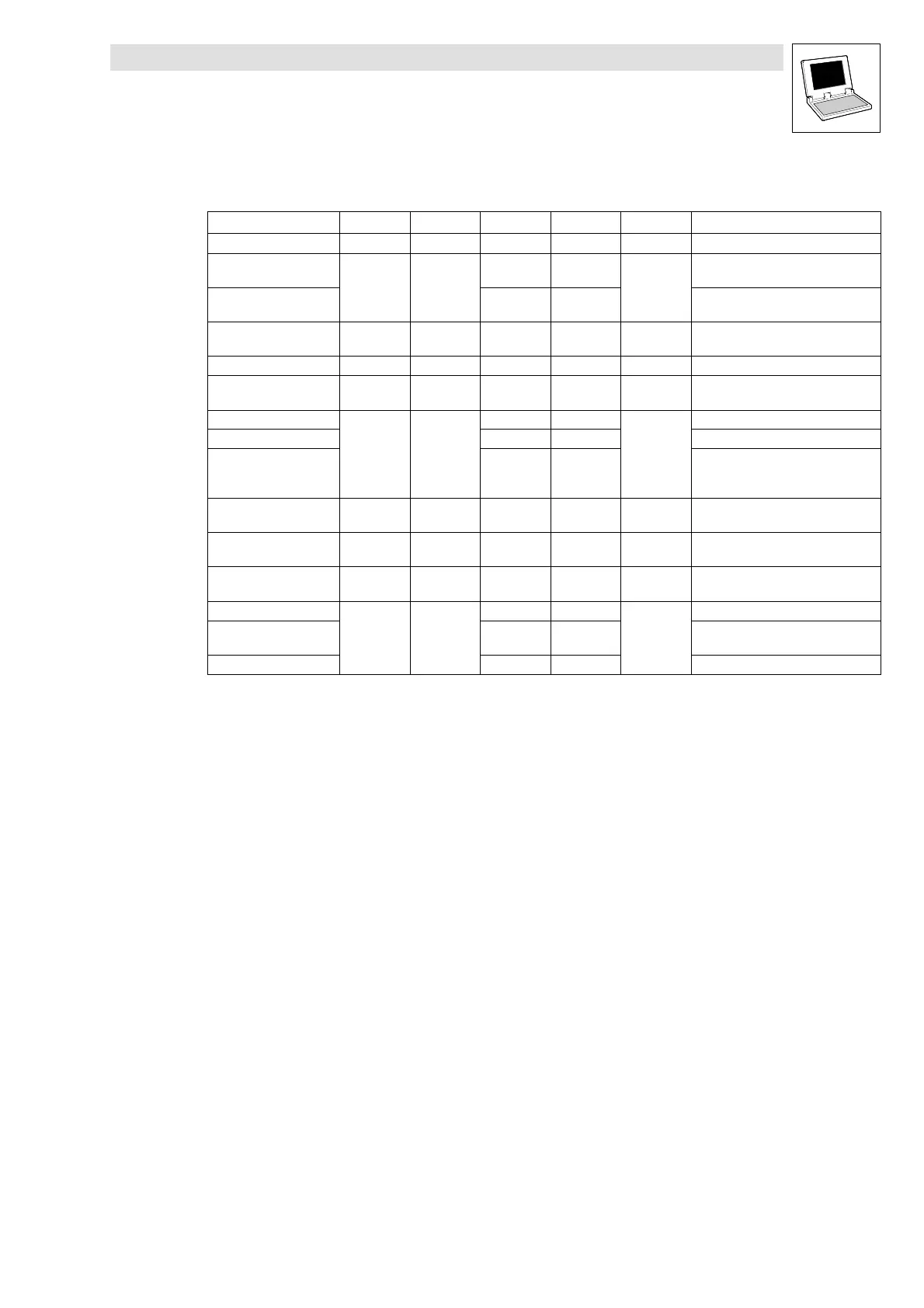
2.12.1 Inputs_MCTRL
VariableName DataType SignalType Address DIS DIS format Note
MCTRL_bQspOut_b Bool binary %QX131.0.0 C0907/3 bin TRUE = drive performs QSP
MCTRL_nHiMLim_a
%QW131.4 C0906/4
Max. torque limitation
• In % of C0057
MCTRL_nLoMLim_a
In
eger analog
%QW131.3 C0906/3
dec
%]
Min. torque limitation
• In % of C0057
MCTRL_bNMSwt_b Bool binary %QX131.0.1 C0907/2 bin
FALSE = Speed limitation
TRUE = Torque control
MCTRL_nNAdapt_a Integer analog %QW131.12 - - Adaptive Vp of the speed controller
MCTRL_bILoad_b Bool binary %QX131.0.3 C0907/4 bin
TRUE = I component of the n-control-
ler is accepted by MCTRL_nISet_a
MCTRL_nISet_ a %QW131.7 C0906/8 I component of speed controller
MCTRL_nNSet_a %QW131.1 C0906/1 Speed setpoint
MCTRL_nPAdapt_a
Integer analog
%QW131.8 C0906/9
dec [%]
Influence of C0254 on VP (in %),
• The absolute value (without sign) is
processed
MCTRL_dnPosSet_p
Double
Integer
position %QD131.5 C0908 dec [inc]
Difference between setpoint and ac-
tual phase of phase controller
MCTRL_nPosLim_a Integer analog %QW131.9 C0906/5 dec [%]
Phase controller influence
• In % of nmax (C0011)
MCTRL_bPosOn_b Bool binary %QX131.0.2 C0907/1 -
TRUE = activate phase-angle control-
ler
MCTRL_nNStartMLim_a %QW131.5 C0906/6 Lower speed limit for speed restriction
MCTRL_nMAdd_a
Integer analog
%QW131.2 C0906/2
dec [%]
Additional torque setpoint or torque
setpoint
MCTRL_nFldWeak_a %QW131.6 C0906/7 Motor excitation
efesotomasyon.com - Lenze
 Loading...
Loading...




