IT-27
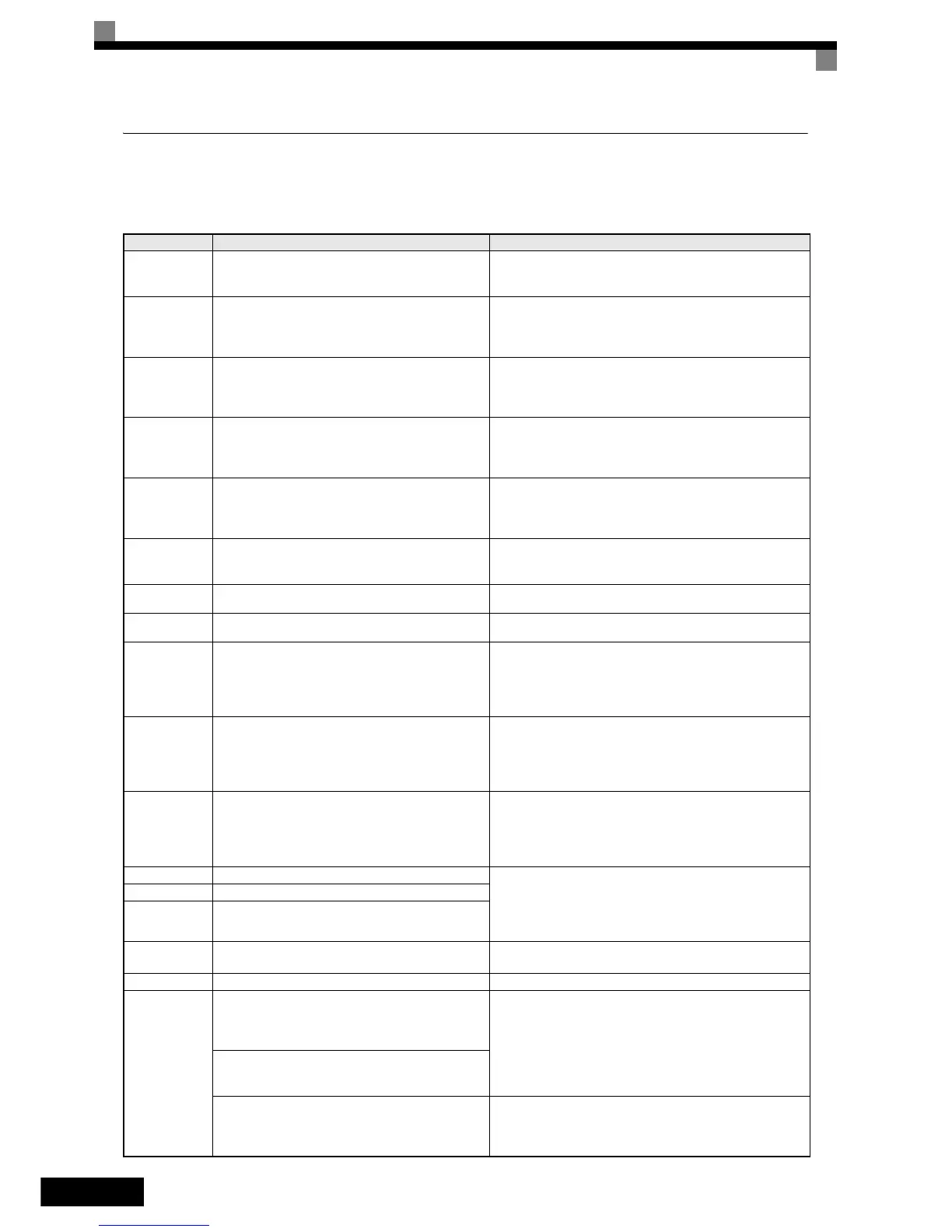
Errori di autotuning
Di seguito vengono indicati gli errori di autotuning. Quando vengono rilevati i seguenti errori, l’errore viene
visualizzato sulla console di programmazione ed il motore continua a funzionare ad inerzia sino all’arresto
completo. Non viene emesso alcun segnale di errore o di allarme.
Display Significato Azioni correttive
Accelerate
Errore di accelerazione
(rilevato solo durante l'autotuning rotante)
Il motore non accelera al momento specificato.
• Aumentare C1-01 (tempo accelerazione 1).
• Aumentare L7-01 e L7-02 (limiti di coppia) se sono bassi.
• Rimuovere le corde e ripetere l'autotuning.
End - 1
V/f Over Setting
Allarme impostazioni V/f
Visualizzato al completamento dell’autotuning
La coppia di riferimento ha superato il 100% e la corrente
a vuoto ha superato il 70% durante l’autotuning.
• Verificare e correggere le impostazioni del motore
• Se il motore e la macchina sono collegati, scollegare il motore dalla
macchina.
End - 2
Saturation
Errore saturazione nucleo motore
Visualizzato al completamento dell’autotuning.
Rilevato solo per autotuning rotante
• Verificare i dati d’ingresso.
• Controllare il cablaggio del motore.
• Se il motore e la macchina sono collegati, scollegare il motore dalla
macchina.
End - 3
Rated FLA Alm
Allarme impostazione corrente nominale
Visualizzato al completamento dell’autotuning
Durante l’autotuning, il valore misurato della corrente nomi-
nale del motore (E2-01) era superiore al valore impostato.
Verificare il valore di corrente nominale del motore.
Fault Errore dati motore
• Verificare i dati d’ingresso.
• La capacità del motore e la capacità dell’inverter non sono compatibili.
Controllare la capacità del motore e dell’inverter.
• Verificare la corrente nominale del motore e la corrente a vuoto.
I-det. Circuit
Errore di rilevamento corrente
La corrente supera la corrente nominale del motore oppure
una fase di uscita è aperta
Verificare il cablaggio dell’inverter e il montaggio.
KE_ERR
(solo motori PM)
Errore costante di voltaggio Controllare il cablaggio del motore
LD_ERR
(solo motori PM)
Errore induttanza Controllare il cablaggio del motore
Leakage Induc-
tance Fault
La misurazione dell'induttanza di dispersione ha provocato
un errore.
La corrente di tuning dell'induttanza di dispersione era troppo
alta o troppo bassa (solo controllo vettoriale ad anello chiuso
per PM)
• Controllare il cablaggio del motore.
• Controllare il valore di ingresso della corrente nominale del motore
• Ridurre o aumentare il livello di corrente per il tuning dell'induttanza
di dispersione modificando il parametro n8-46.
Minor Fault
Gli allarmi sopra riportati si sono verificati durante l'autotuning
oppure l'inverter era in condizione di blocco delle basi quando
l'autotuning è iniziato.
• Uscire dal menu di autotuning, controllare il contenuto dell'allarme
ed eliminare la causa come descritto nell'elenco allarmi sopra riportato.
• Verificare i dati d’ingresso.
• Verificare che l'inverter non sia in condizione di blocco delle basi
durante l'autotuning.
Motor Speed
Errore velocità motore
Rilevato solo per autotuning rotante
La coppia di riferimento supera il 100% durante l'accelerazione.
Viene rilevato solo quando A1-02 è impostato su 2
(controllo vettoriale ad anello aperto).
• Se il motore è collegato alla macchina, scollegarlo.
• Aumentare C1-01 (tempo accelerazione 1).
• Verificare i dati di input (in particolare il numero degli impulsi di PG
e il numero di poli del motore).
• Eseguire un autotuning non rotante
No-Load Current Errore di corrente a vuoto • Verificare i dati d’ingresso.
• Controllare il cablaggio del motore.
• Se il motore è collegato alla macchina, scollegarlo.
• Se l’impostazione di T1-03 è superiore alla tensione di alimentazione
di ingresso inverter (E1-01), cambiare i dati di ingresso.
Resistance Errore resistenza line-to-line
Rated slip Errore scorrimento nominale
RS_ERR
(solo motori PM)
Errore resistenza line-to-line
• Controllare il cablaggio del motore
• Controllare i dati di ingresso del motore
STOP key Ingresso tasto STOP -
Z_SRCH_ERR
(solo motori PM)
Tutti gli encoder:
La velocità del motore supera i 20 giri/min all'avvio
dell'autotuning. Non è stato possibile eseguire l'autotuning
della posizione del polo magnetico nel tempo specificato.
• Rimuovere le corde e ripetere l'autotuning
• Controllare la direzione di rotazione dell'encoder e, se necessario,
modificare F1-05.
Encoder con impulso Z:
La differenza tra due misurazioni della posizione del polo
magnetico supera i 3°.
Encoder seriali:
La differenza tra due misurazioni della posizione del polo
magnetico era superiore a 5° oppure si è verificato un errore
di comunicazione seriale dell'encoder durante l'autotuning.
• Controllare il cablaggio dell'encoder (ordine, schermatura, ecc.)
• Controllare l'alimentazione dell'encoder.
Sostituire l'encoder.
 Loading...
Loading...











