53 / 100
Siemens Commissioning Guide CM1G5192en
Building Technologies 8 Additional functions 29.07.2010
7.8.1 Parameter changes
Start with quick commissioning according to application 1
Par. no. Value Parameter function Function selection
P0501(0) 4 Type of sensor Set input scale to range of QBE620 – P25
P0701(0) 16 Function of digital input 1 in “Auto” mode Set DIN 1 for fixed freq SP + ON
P0756(0) 0 Analog input Unipolar voltage input (DC 0…10 V)
P1080 5 Motor minimum frequency Minimum frequency
P1210 3 Restart after fault / mains break Auto restart after mains fail
P2200 1 Enable PID controller Enable PID loop
P2201 60 Fixed PID setpoint Fixed setpoint as a percentage of sensor range
P2253 2224 PID setpoint PID setpoint source
P2264 755.0 PID feedback Sets PID feedback source to AIN-1
P2274 0 PID derivative action time Derivative action time
P2280 1.5 PID proportional band Proportional band
P2285 20 PID integral action time Integral action time
P2306 0 PID acting direction Direct acting loop
P2390 20 Hibernation frequency Hibernation setpoint [%]
P2391 60 Hibernation timer Hibernation timer in seconds
P2392 -5 Restart PID controller deviation Restart – PID error in %
r2262 Filtered PID setpoint Display actual setpoint in C
r2272 PID scaled feedback Display actual condenser pressure
r2273 PID error Display actual PID error in %
r2294 PID output Display actual VSD output in %
8 Additional functions
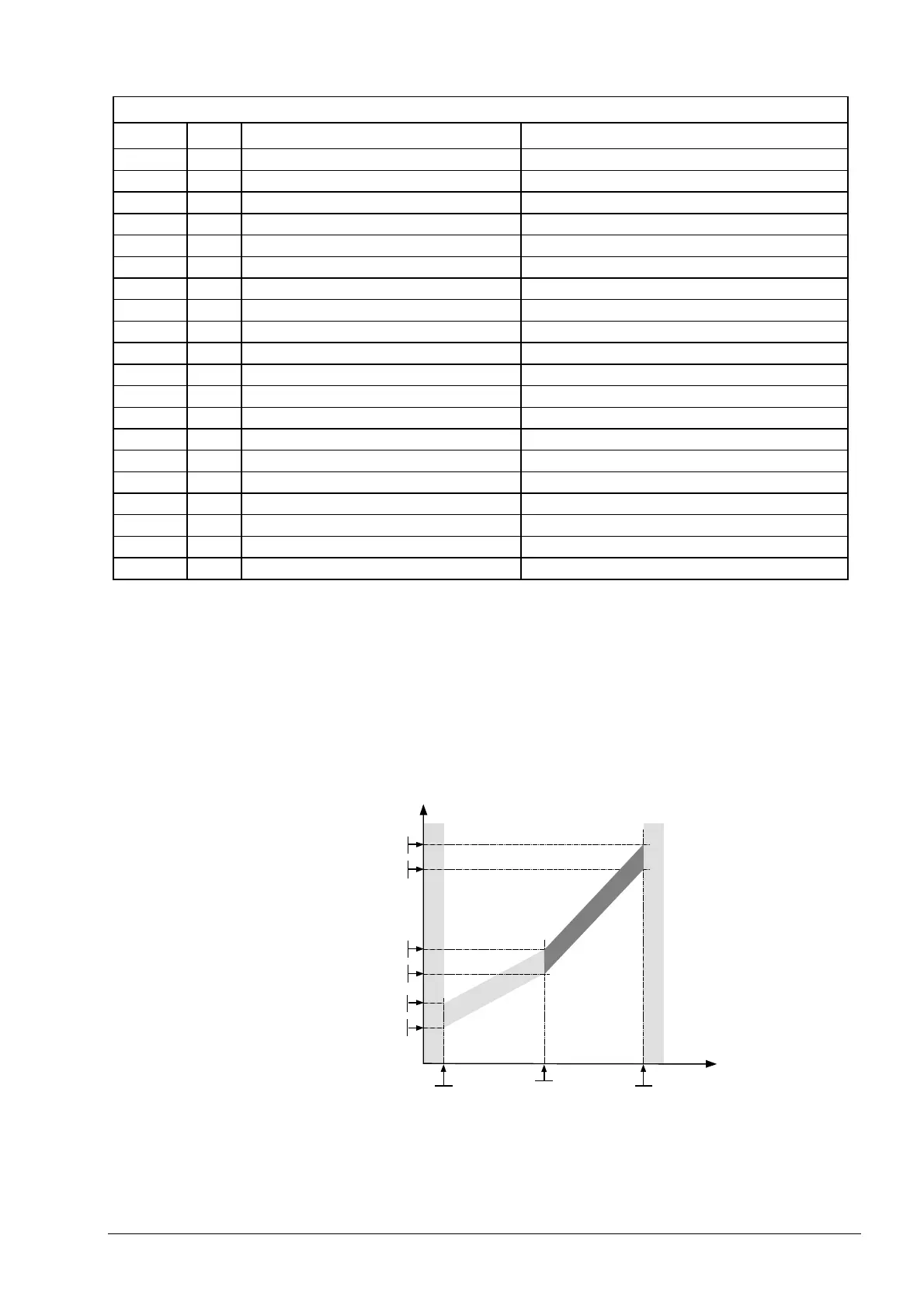
8.1 Belt failure detection without sensor
Carry out quick commissioning and modify the parameters for normal operation, then proceed as follows:
Frequency /
torque curve
Torque [Nm]
Frequency [Hz]
Threshold frequency 1 Threshold frequency 3
Threshold frequency 2
P2182 P2184
P2183
P2189
Upper torque threshold 3
P2190 unterer
Lower torque threshold 3
P2187
Upper torque threshold 2
P2188
Lower torque threshold 2
P2185
Upper torque threshold 1
P2186
Lower torque threshold 1
5192D01en
 Loading...
Loading...











