Appendix
Communication with MotionBus/system bus (CAN)
Process data transfer
12
339
EDBCSXM064 EN 11.0
12.3.3 Process data transfer
Agreements
ƒ Process data telegrams between host (master) and controller (slave) are
distinguished as follows with regard to their direction:
– Process data telegrams to the controller
– Process data telegrams from the controller
ƒ In CANopen, the process data objects are named from the node’s view:
– RPDOx: A process data object received by a node
– TPDOx: A process data object transmitted by a node
12.3.3.1 Available process data objects
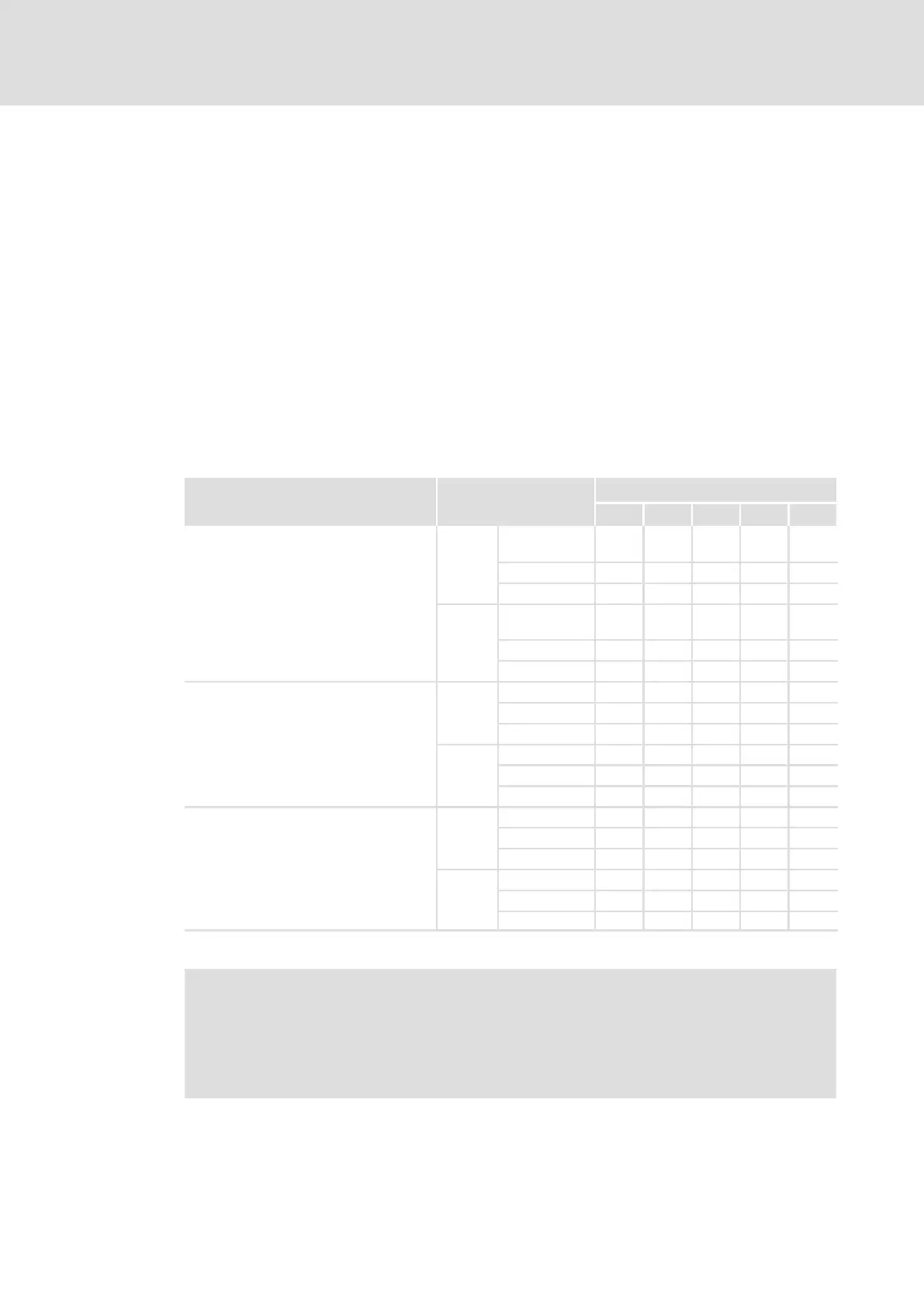
The following process data objects (PDOs) are available for the ECS modules via the
interfaces X1, X4 and X14:
Interface PDOs
RPDO: to ECS module
TPDO: from ECS module
Availability in ECS modules
ECSxE ECSxS ECSxP ECSxM ECSxA
X1
Automation interface (AIF)
RPDO
AIF1_IN ˘ ü V3.0 or
higher
V3.0 or
higher
ü
AIF2_IN ˘ ü ˘ ˘ ü
AIF3_IN ˘ ü ˘ ˘ ü
TPDO
AIF1_OUT ˘ ü V3.0 or
higher
V3.0 or
higher
ü
AIF2_OUT ˘ ü ˘ ˘ ü
AIF3_OUT ˘ ü ˘ ˘ ü
X4
ECSxS/P/M: MotionBus (CAN)
ECSxA/E: System bus (CAN)
RPDO
CAN1_IN ü ü ü ü ü
CAN2_IN ˘ ü ü ˘ ü
CAN3_IN ü ü ü ˘ ü
TPDO
CAN1_OUT ü ü ü ü ü
CAN2_OUT ü
1)
ü ü ˘ ü
CAN3_OUT ü ü ü ˘ ü
X14
System bus (CAN)
Interface is not available for ECSxE.
RPDO
CANaux1_IN ˘ ˘ ü ˘ ü
CANaux2_IN ˘ ˘ ü ˘ ü
CANaux3_IN ˘ ˘ ˘ ˘ ü
TPDO
CANaux1_OUT ˘ ˘ ü ˘ ü
CANaux2_OUT ˘ ˘ ü ˘ ü
CANaux3_OUT ˘ ˘ ˘ ˘ ü
1) ECSxE from V5.0: CAN2_OUT (Diagnostic PDO)
Note!
Power supply module ECSxE
In case of the ECSxE power supply module, the PDOs CAN1_IN/OUT and
CAN3_IN/OUT cannot be used simultaneously. The PDOs to be used are
selected via C0360.
 Loading...
Loading...