3 - 13
3 Specifications
AC Servomotors/Servo Drives 1S-series with Built-in EtherCAT® Communications User’s Manual (I586)
3-1 Servo Drive Specifications
3
3-1-3 EtherCAT Communications Specifications
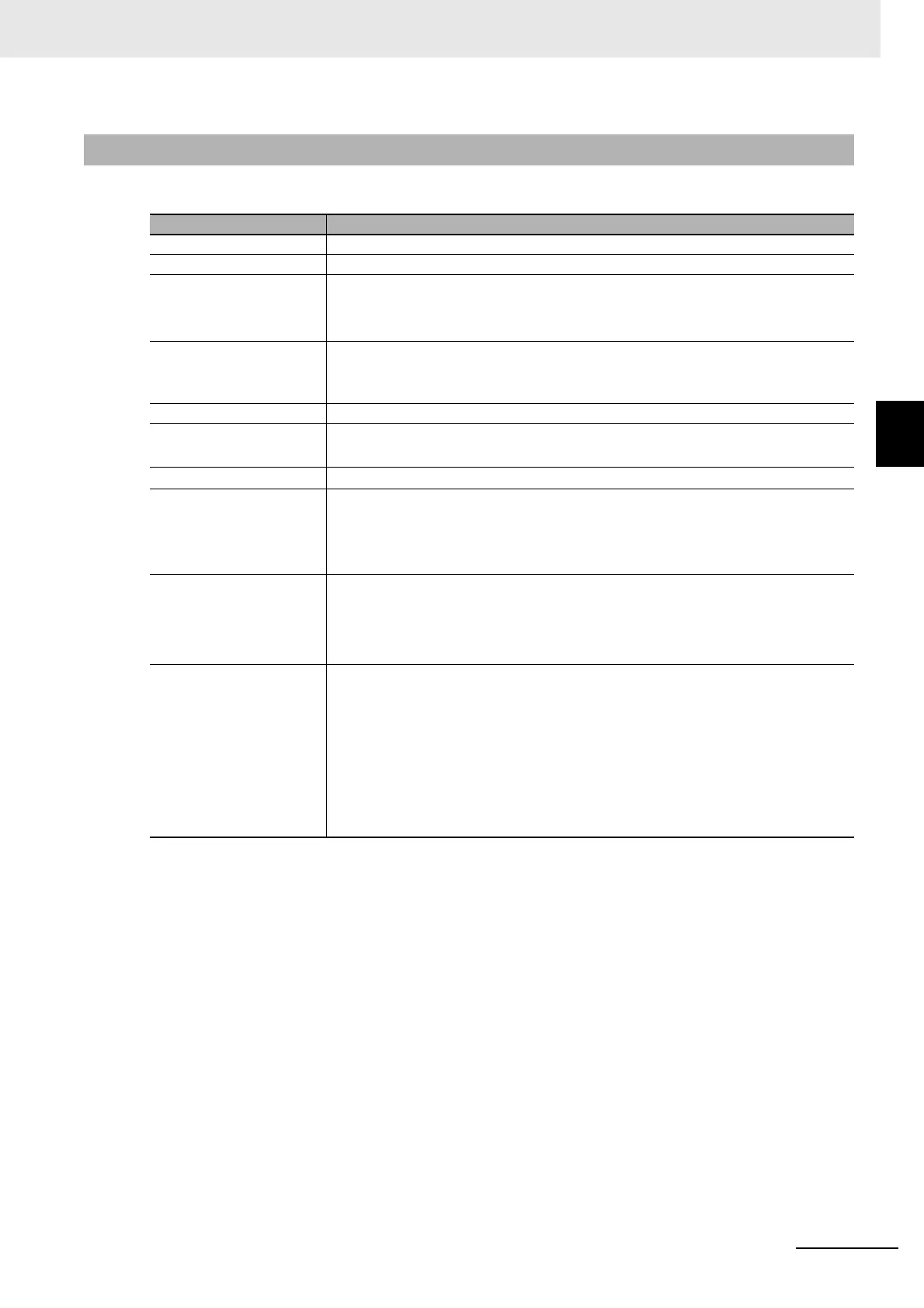
The specifications of EtherCAT communications are shown below.
3-1-3 EtherCAT Communications Specifications
Item Specifications
Communications standard IEC 61158 Type 12, IEC 61800-7 CiA 402 Drive Profile
Physical layer 100BASE-TX (IEEE802.3)
Connectors RJ45 × 2 (shielded)
ECAT IN: EtherCAT input
ECAT OUT: EtherCAT output
Communications media Recommended media:
Twisted-pair cable, which is doubly shielded by the aluminum tape and braid, with
Ethernet Category 5 (100BASE-TX) or higher
Communications distance Distance between nodes: 100 m max.
Process data Fixed PDO mapping
Variable PDO mapping
Mailbox (CoE)
Emergency messages, SDO requests, SDO responses, and SDO information
Synchronization mode
and communications cycle
DC Mode (Synchronous with Sync0 Event)
Communications cycle: 125 µs, 250 µs, 500 µs, 750 µs, 1 to 10 ms (in 0.25 ms
increments)
Free Run Mode
Indicators ECAT-L/A IN (Link/Activity IN) × 1
ECAT-L/A OUT (Link/Activity OUT) × 1
ECAT-RUN × 1
ECAT-ERR × 1
CiA 402 Drive Profile • Cyclic synchronous position mode
• Cyclic synchronous velocity mode
• Cyclic synchronous torque mode
• Profile position mode
• Profile velocity mode
• Homing mode
• Touch probe function
• Torque limit function
 Loading...
Loading...

