5 - 23
5 EtherCAT Communications
AC Servomotors/Servo Drives 1S-series with Built-in EtherCAT® Communications User’s Manual (I586)
5-9 Cable Redundancy Function
5
5-9-4 Slave Communications Statuses When Cable Redundancy Function Is Used
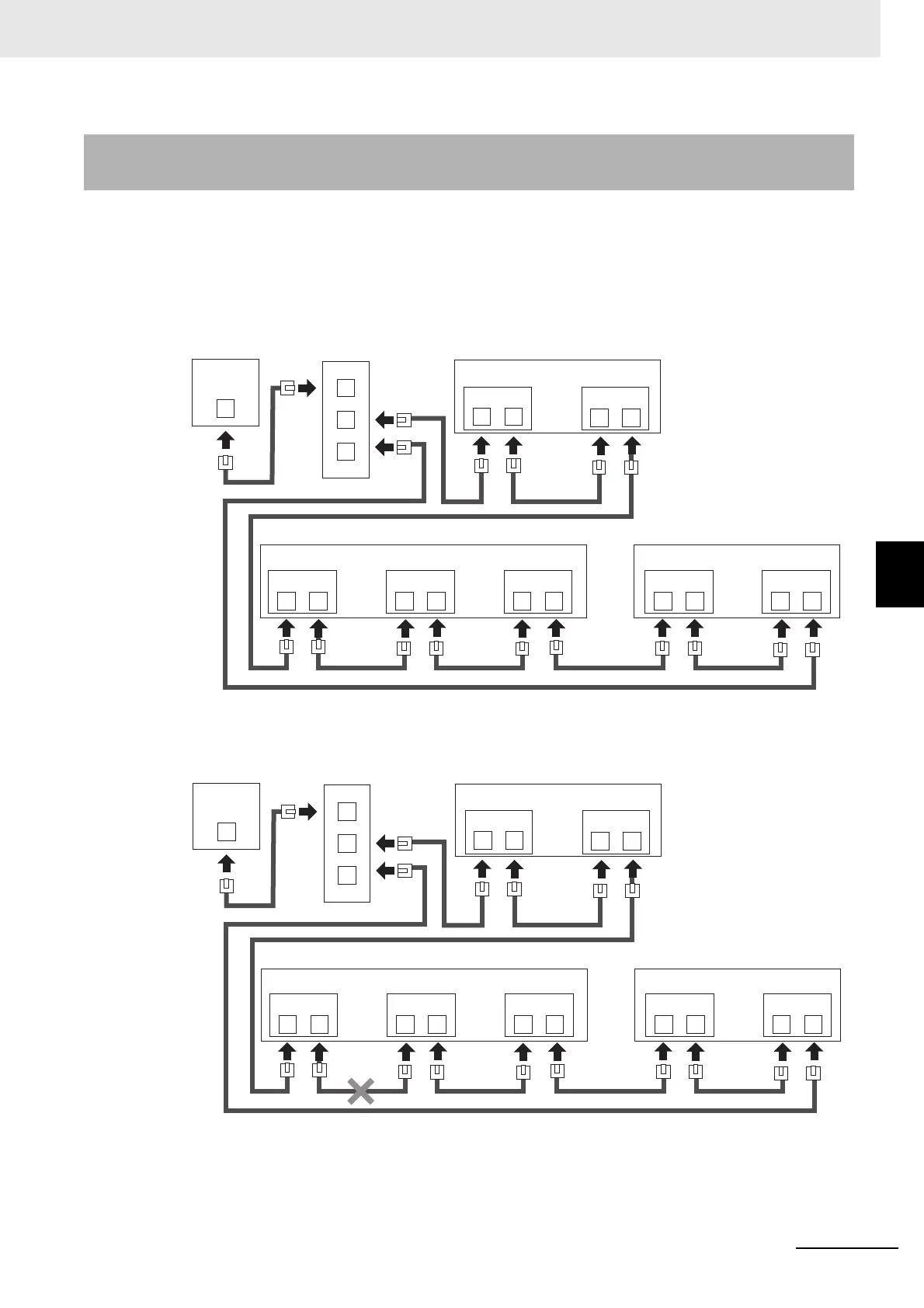
This section takes the following example in which the cable redundancy function is used and a ring
topology is configured, and describes communications statuses during normal operation and in the ring
disconnection status. The configuration example contains three devices in the ring topology.
Normal Status
All slaves are in communication.
Ring Disconnection Status
Although the ring is broken between Slave C and D, all slaves continue communications.
Stop Device X to Z and then turn OFF the power supply to the EtherCAT master. Fix the ring discon-
nection status by replacing the cable, and then turn ON the power supply to the EtherCAT master
and to the devices, which returns the system to the normal communications status.
5-9-4 Slave Communications Statuses When Cable Redundancy Func-
tion Is Used
EtherCAT Master
Slave A
Junction Slave
Device X
Slave B
Slave C Slave D Slave F Slave GSlave E
Device ZDevice Y
EtherCAT Master
Slave A
Junction Slave
Device X
Slave B
Slave C Slave D Slave F Slave GSlave E
Device ZDevice Y
Open circuit
 Loading...
Loading...

