7 Applied Functions
7 - 6
AC Servomotors/Servo Drives 1S-series with Built-in EtherCAT® Communications User’s Manual (I586)
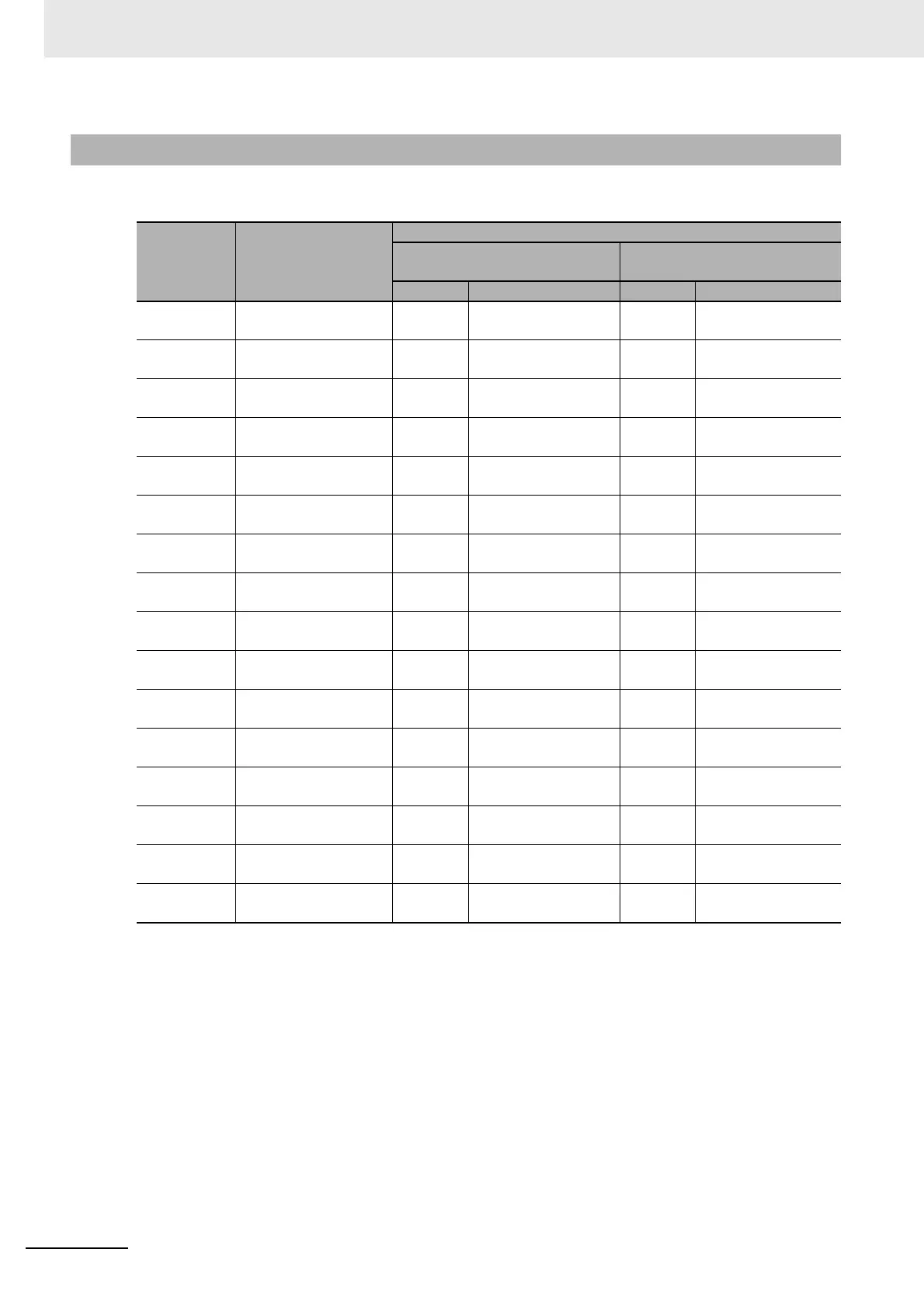
The allocations of the default input signals are as follows.
7-1-2 Default Setting
Index (hex) Name
Default setting
Subindex 01 hex
Port Selection
Subindex 02 hex
Logic Selection
Set value Status Set value Status
4630 Positive Drive Prohibi-
tion Input
2 General Input 2 (IN2) 1 Negative logic (NC
contact)
4631 Negative Drive Prohibi-
tion Input
3 General Input 3 (IN3) 1 Negative logic (NC
contact)
4632 External Latch Input 1 7 General Input 7 (IN7) 0 Positive logic (NO
contact)
4633 External Latch Input 2 8 General Input 8 (IN8) 0 Positive logic (NO
contact)
4634 Home Proximity Input 4 General Input 4 (IN4) 0 Positive logic (NO
contact)
4635 Positive Torque Limit
Input
0 No allocation 0 Positive logic (NO
contact)
4636 Negative Torque Limit
Input
0 No allocation 0 Positive logic (NO
contact)
4637 Error Stop Input 1 General Input 1 (IN1) 1 Negative logic (NC
contact)
4638 Monitor Input 1 5 General Input 5 (IN5) 0 Positive logic (NO
contact)
4639 Monitor Input 2 6 General Input 6 (IN6) 0 Positive logic (NO
contact)
463A Monitor Input 3 0 No allocation 0 Positive logic (NO
contact)
463B Monitor Input 4 0 No allocation 0 Positive logic (NO
contact)
463C Monitor Input 5 0 No allocation 0 Positive logic (NO
contact)
463D Monitor Input 6 0 No allocation 0 Positive logic (NO
contact)
463E Monitor Input 7 0 No allocation 0 Positive logic (NO
contact)
463F Monitor Input 8 0 No allocation 0 Positive logic (NO
contact)
 Loading...
Loading...

