9 Details on Servo Parameters
9 - 102
AC Servomotors/Servo Drives 1S-series with Built-in EtherCAT® Communications User’s Manual (I586)
• Gives the motor manufacturer name.
• Mirror object of 6404 hex
• The Motor ID Setup is executed by the writing of 7465 736D hex.
• Gives the execution status of Motor Setup.
Description of Set Values
• Selects the mode of without motor operation.
Description of Set Values
• When a value is set to “1: Without motor operation”, the Servo Drive operates as the Servomotor
is virtually connected to it. Therefore, the Servo Drive displays present position and present veloc-
ity without Encoder Communications Error etc, even if the Servomotor is not actually connected.
• The following table shows the operation in Without motor operation.
Subindex 92 hex: Motor Manufacturer
Subindex F1 hex: Motor Setup
Subindex FF hex: Setup Status
Set value Description
0 Setup is not executed or completed
1 Setup in execution
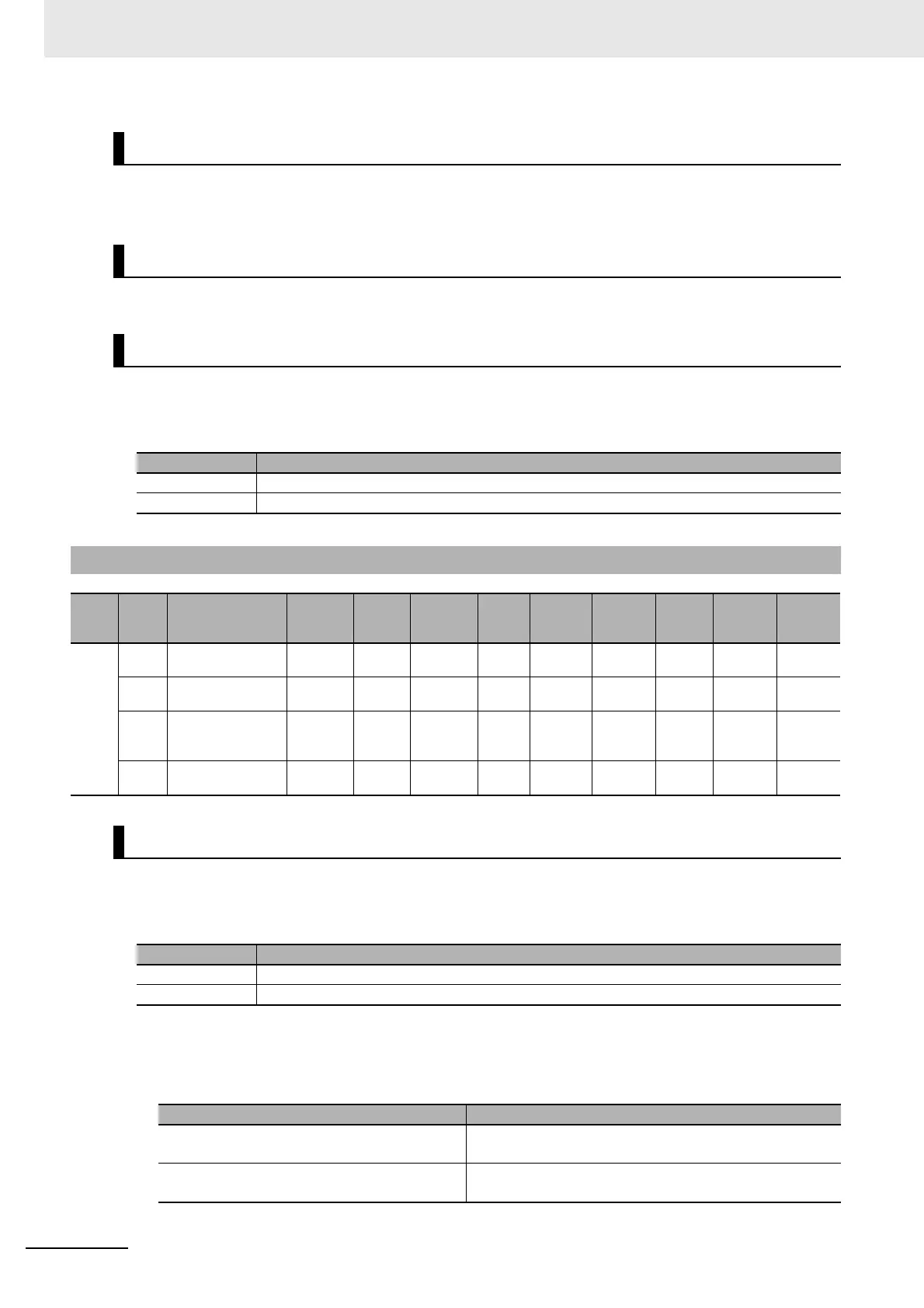
9-12-2 4412 hex: Motor Advanced Setting
Index
(hex)
Sub-
index
(hex)
Object name
Setting
range
Unit
Default
setting
Data
attri-
bute
Size Access
PDO
map
Com-
plete
access
Modes
of oper-
ation
4412 --- Motor Advanced
Setting
--- --- --- --- --- --- --- Possible ---
00 Number of entries --- --- 81 hex --- 1 byte
(U8)
RO --- --- ---
02 Without Motor
Operation Selec-
tion
0 to 1 --- 1 R 4 bytes
(INT32)
RW --- --- ---
81 Without Motor
Operation Status
--- --- --- --- 4 bytes
(INT32)
RO TxPDO --- ---
Subindex 02 hex: Without Motor Operation Selection
Set value Description
0 Normal operation
1 Without motor operation
Item Description
Encoder - Operation Selection when Using
Absolute Encoder (4510-01 hex)
Operates as 1 (Use as the incremental encoder).
Load Inertia Regards that the load inertia of the value displayed in Iner-
tia Ratio Display (3001-81 hex) is connected.
 Loading...
Loading...

