9 Details on Servo Parameters
9 - 12
AC Servomotors/Servo Drives 1S-series with Built-in EtherCAT® Communications User’s Manual (I586)
Sets the mechanical system which is connected to the motor.
• Sets the ratio of load inertia to the motor rotor inertia.
• Inertia ratio = (Load inertia ÷ Rotor inertia) × 100%
• Selects whether to enable or disable backlash compensation in the position control, and the opera-
tion direction for the compensation.
Description of Set Values
• Sets the backlash compensation amount in the position control.
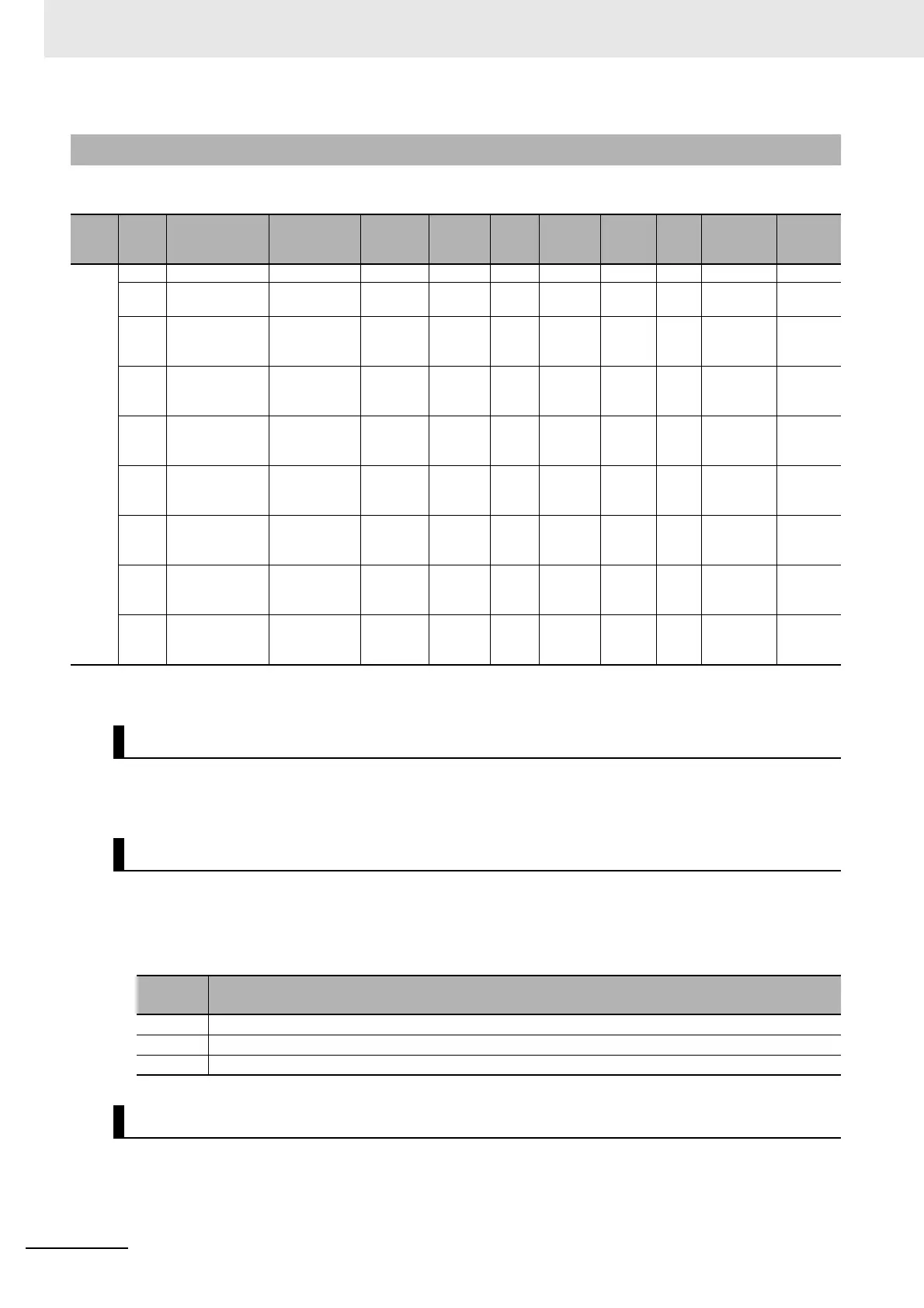
9-2-2 3001 hex: Machine
Index
(hex)
Sub-
index
(hex)
Object name Setting range Unit
Default
setting
Data
attri-
bute
Size Access
PDO
map
Complete
access
Modes
of oper-
ation
3001 --- Machine --- --- --- --- --- --- --- Possible ---
00 Number of
entries
--- --- 81 hex --- 1 byte
(U8)
RO --- --- ---
01 Inertia Ratio
0 to 30,000
*1
*1. The default setting is 30 for the unit version 1.3 or earlier.
% 250 A 4 bytes
(INT32)
RW --- --- csp, csv,
cst, pp,
pv, hm
02 Backlash Com-
pensation
Selection
0 to 2 --- 0 R 4 bytes
(INT32)
RW --- --- csp, pp,
hm
03 Backlash Com-
pensation
Amount
-262,144 to
262,143
Com-
mand unit
0 E 4 bytes
(INT32)
RW --- --- csp, pp,
hm
04 Backlash Com-
pensation Time
Constant
0 to 6,400 0.01 ms 0 E 4 bytes
(INT32)
RW --- --- csp, pp,
hm
05 Motor Revolu-
tions
0 to
1,073,741,824
--- 1 R 4 bytes
(U32)
RW --- --- csp, csv,
cst, pp,
pv, hm
06 Shaft Revolu-
tions
1 to
1,073,741,824
--- 1 R 4 bytes
(U32)
RW --- --- csp, csv,
cst, pp,
pv, hm
81 Inertia Ratio
Display
--- % --- --- 4 bytes
(INT32)
RO --- --- csp, csv,
cst, pp,
pv, hm
Subindex 01 hex: Inertia Ratio
Subindex 02 hex: Backlash Compensation Selection
Set
value
Description
0 Disabled
1 Compensate at the first positive operation after servo ON
2 Compensate at the first negative operation after servo ON
Subindex 03 hex: Backlash Compensation Amount
 Loading...
Loading...

