12 Troubleshooting
12 - 42
AC Servomotors/Servo Drives 1S-series with Built-in EtherCAT® Communications User’s Manual (I586)
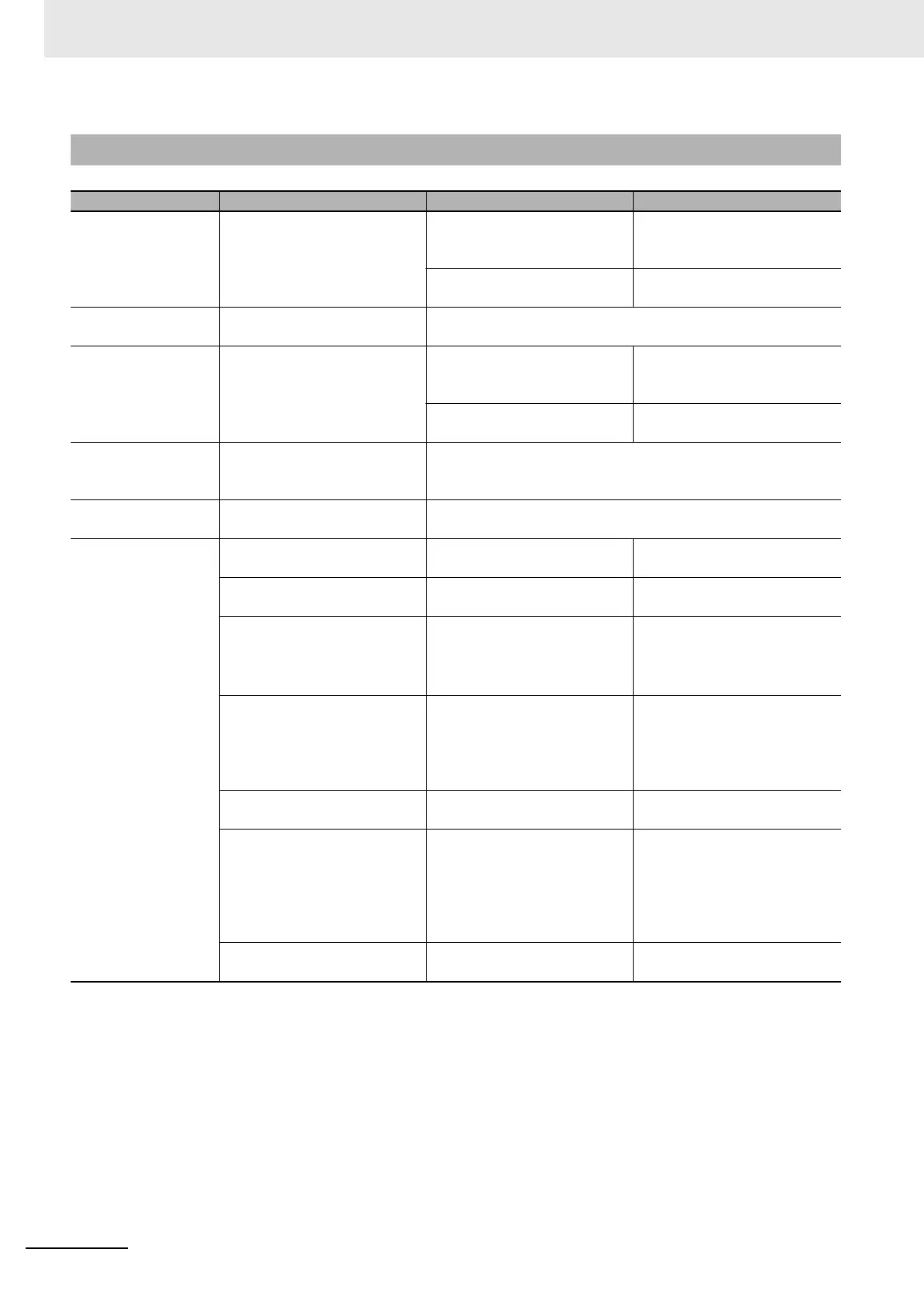
12-5-3 Troubleshooting Using the Operation State
Symptom Probable cause Check items Measures
The 7-segment dis-
play does not light.
The control power is not sup-
plied.
Check to see if the power sup-
ply input is within the allowed
power supply voltage range.
Supply the correct power sup-
ply voltage.
Check to see if the power sup-
ply input is wired correctly.
Wire correctly.
The ECAT ERR indi-
cator flashes or lights.
A communications-related error
occurred.
Refer to EtherCAT Communications Warning on page 12-9.
The L/A IN and L/A
OUT indicators are
OFF.
A link in the EtherCAT physical
communications layer is not
established.
Check to see if the communica-
tions cable is connected cor-
rectly.
Connect the communications
cable correctly.
Check to see if the host control-
ler started.
Start the host controller.
The L/A IN or L/A
OUT indicator is OFF.
In a ring topology configuration,
the ring disconnection status
occurred.
Refer to 13-4 Method for Broken Ring Maintenance and Inspec-
tion on page 13-5 and perform inspection. If the Servo Drive is
faulty, replace it.
An error occurred. Read the error number and the
error log.
Check the cause listed in 12-5-1 Troubleshooting Using Error
Displays on page 12-16.
The Servo does not
lock.
The power cable is not con-
nected correctly.
Check to see if the motor power
cable is connected properly.
Wire the motor power cable
correctly.
The Servomotor power supply
is not ON.
Check the main circuit wiring
and power voltage.
Input the correct power and
voltage for the main circuit.
Positive Drive Prohibition Input
(POT) or Negative Drive Prohi-
bition Input (NOT) is OFF.
• Check to see if the input for
POT or NOT is OFF.
• Check the input of +24 VIN to
CN1.
Turn ON POT and NOT. Input
+24 VIN correctly.
The torque limit is set to 0. Check to see if the torque limits
in the Positive torque limit
value (60E0 hex) and the Neg-
ative torque limit value (60E1
hex) are set to 0.
Set the maximum torque that
you use for each of these
objects.
The Servo Drive is in a safe
state (STO).
Check the wiring of the safety
input.
Wire correctly.
Communications with the
Safety CPU Unit are not estab-
lished.
When you use the STO func-
tion via EtherCAT communica-
tions, confirm that
communications with the
Safety CPU Unit are per-
formed.
Make the settings for the Safety
CPU Unit.
The Servo Drive is broken
down.
--- Replace the Servo Drive.
 Loading...
Loading...

