7 Applied Functions
7 - 50
AC Servomotors/Servo Drives 1S-series with Built-in EtherCAT® Communications User’s Manual (I586)
7-14 Communications Error Period Com-
mand Correction Function
If a target position is lost because of a communications error, this function corrects the next target posi-
tion on the basis of the previous target position.
The communications error period command correction function is always enabled under the following
conditions.
• The mode of operation is Cyclic synchronous position mode (csp)
• The synchronous mode is Distributed Clock (DC) Mode
This function corrects a target position so that the Velocity of Position Command (3010-83 hex)
becomes equal to the previous velocity. When the mode of operation is Cyclic synchronous velocity
mode (csv) or Cyclic synchronous torque mode (cst), the previous command is retained.
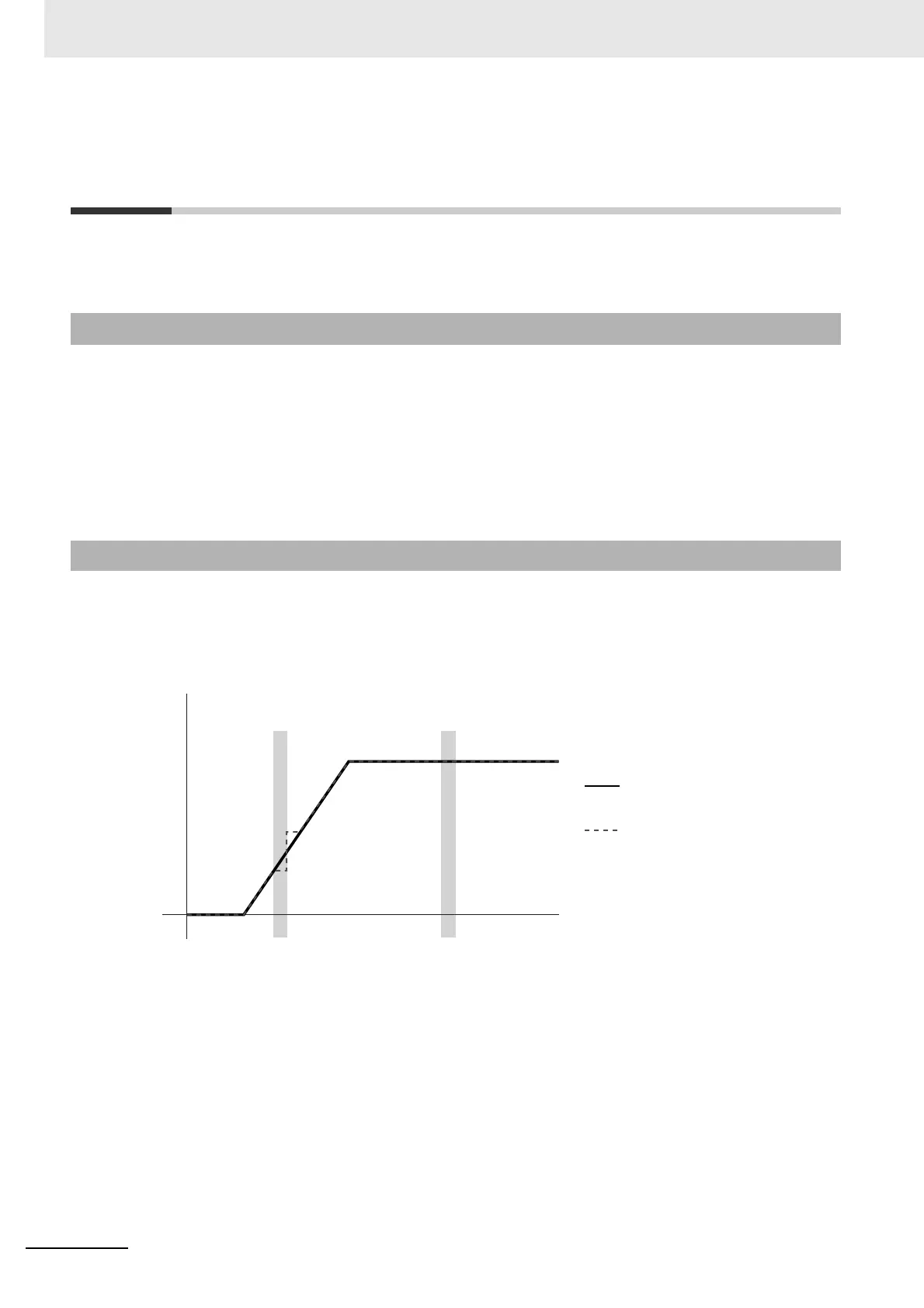
The following is an operation example. The velocities corrected by this function are closer to the Veloc-
ity of Position Command (3010-83 hex), which is expected when no communications error occurs,
than the velocities not corrected.
7-14-1 Operating Conditions
7-14-2 Operation Example
Velocity of
Position Command
When a communications
error occurs
When no communications
error occurs
Communications
error occurs
Communications
error occurs
 Loading...
Loading...

