11 - 29
11 Adjustment Functions
AC Servomotors/Servo Drives 1S-series with Built-in EtherCAT® Communications User’s Manual (I586)
11-12 Feed-forward Function
11
11-12-1 Feed-forward Control in TDF Control
11-12 Feed-forward Function
The feed-forward function is used to improve the following performance for the target position and
velocity.
In the normal TDF control, do not add Velocity offset (60B1 hex) and Torque offset (60B2 hex),
because the optimized feed-forward amount is input from the TDF control section.
The following are the feed-forward setting objects used in the TDF control.
11-12-1 Feed-forward Control in TDF Control
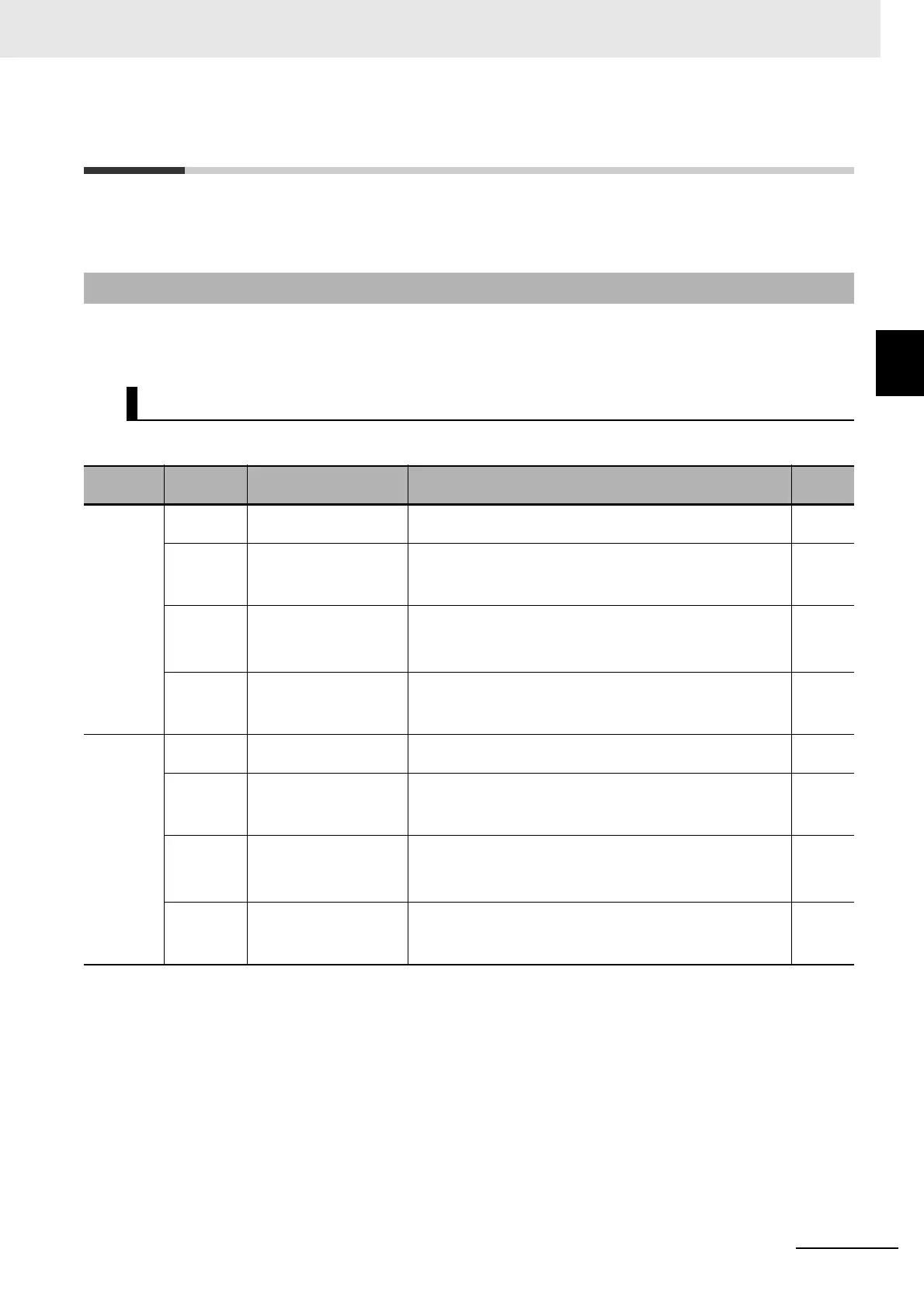
TDF Control-related Objects
Index
(hex)
Subindex
(hex)
Name Description
Refer-
ence
3120
---
TDF Position Control Sets the operation in the two-degree-of-freedom position
control.
P. 9 - 3 0
01 Command Following
Gain
Sets the following performance for the target position.
The higher the gain is, the higher the following performance
of the internal command is for the target position.
P. 9 - 3 1
10 Command Following
Gain Selection
*1
*1. These objects are available for the unit version 1.1 or later.
Selects the command following gain switching method.
0: Use the Command Following Gain.
1: Use the Command Following Gain 2.
P. 9 - 3 1
11 Command Following
Gain 2
*1
Sets the cutoff frequency to the position command.
The higher the set value is, the higher the following perfor-
mance of the internal command is for the target position.
P. 9 - 3 1
3121
---
TDF Velocity Control Sets the operation in the two-degree-of-freedom velocity
control.
P. 9 - 3 1
01 Command Following
Gain
Sets the following performance for the target velocity.
The higher the gain is, the higher the following performance
of the internal command is for the target velocity.
P. 9 - 3 2
10 Command Following
Gain Selection
*1
Selects the command following gain switching method.
0: Use the Command Following Gain.
1: Use the Command Following Gain 2.
P. 9 - 3 2
11 Command Following
Gain 2
*1
Sets the cutoff frequency to the velocity command.
The higher the set value is, the higher the following perfor-
mance of the internal command is for the target velocity.
P. 9 - 3 2
 Loading...
Loading...

