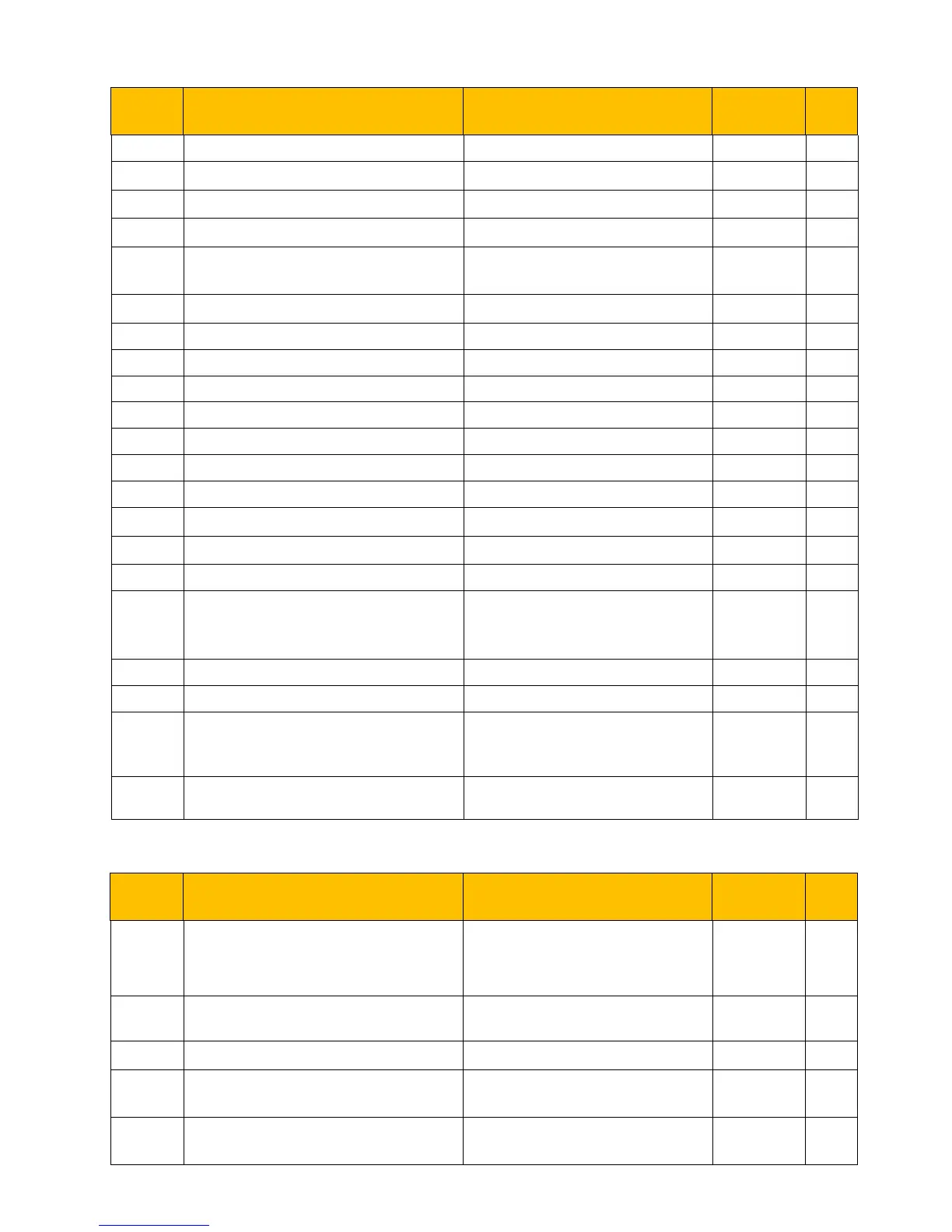
FA02 PID feedback signal source 1: AI1 2: AI2 0 √
FA03 Max limit of PID adjusting (%)
FA04~100.0
10.00 √
FA04
Digital setting value of PID adjusting (%)
FA05~FA03
50.0 √
FA05
Min limit of PID adjusting (%)
0.0~FA04
0.0 √
FA06 PID polarity
0: Positive feedback
1: Negative feedback
1
╳
FA07
Sleep function selection
0: Valid 1: Invalid 0
╳
FA09 Min frequency of PID adjusting (Hz) Max(F112, 0.1)~F111 5.00 √
FA10 Sleep delay time (S) 0~500.0 15.0 √
FA11 Wake delay time (S) 0.0~3000 3.0 √
FA18 Whether PID adjusting target is changed 0: Invalid 1: Valid 1 √
FA19 Proportion Gain P 0.00~10.00 0.3 √
FA20 Integration time I (S) 0.0~100.0S 0.3 √
FA21 Differential time D (S) 0.00~10.00 0.0 √
FA22
PID sampling period (S)
0.1~10.0s
0.1 √
FA29
PID dead time (%)
0.0~10.0
2.0 √
FA58 Fire pressure given value (%) 0.0~100.0 80.0 √
FA59
Emergency fire mode 0: Invalid
1: Emergency fire mode 1
2: Emergency fire mode 2
0 √
FA60 Running frequency of emergency fire F112~F111 50.0 √
FA61 Reserved
FA62
When emergency fire control terminal is
invalid
0: inverter cannot be stopped
manually
1: inverter can be stopped manually
0
×
FA63-
FA80
Reserved
Torque control parameters: FC00-FC40
Function
Code
FC00
Speed/torque control selection
0:Speed control
1:Torque control
2:Terminal switchover
0
√
FC01
Delay time of torque/speed control
switchover(S)
0.0~1.0
0.1
╳
FC02
Torque accel/decel time (S)
0.1~100.0
1
√
FC03-
FC05
Reserved
FC06 Torque reference source
0: Digital given (FC09)
1: Analog input AI1
0
╳

 Loading...
Loading...









