4 Repair
4.4.2. Replacement of complete upper arm, IRB 1600ID
1333HAC026660-001 Revision: C
© Copyright 2006-2008 ABB. All rights reserved.
4.4.2. Replacement of complete upper arm, IRB 1600ID
NOTE!
Recalibration of robot axis 3-6 is required after replacement of upper arm.
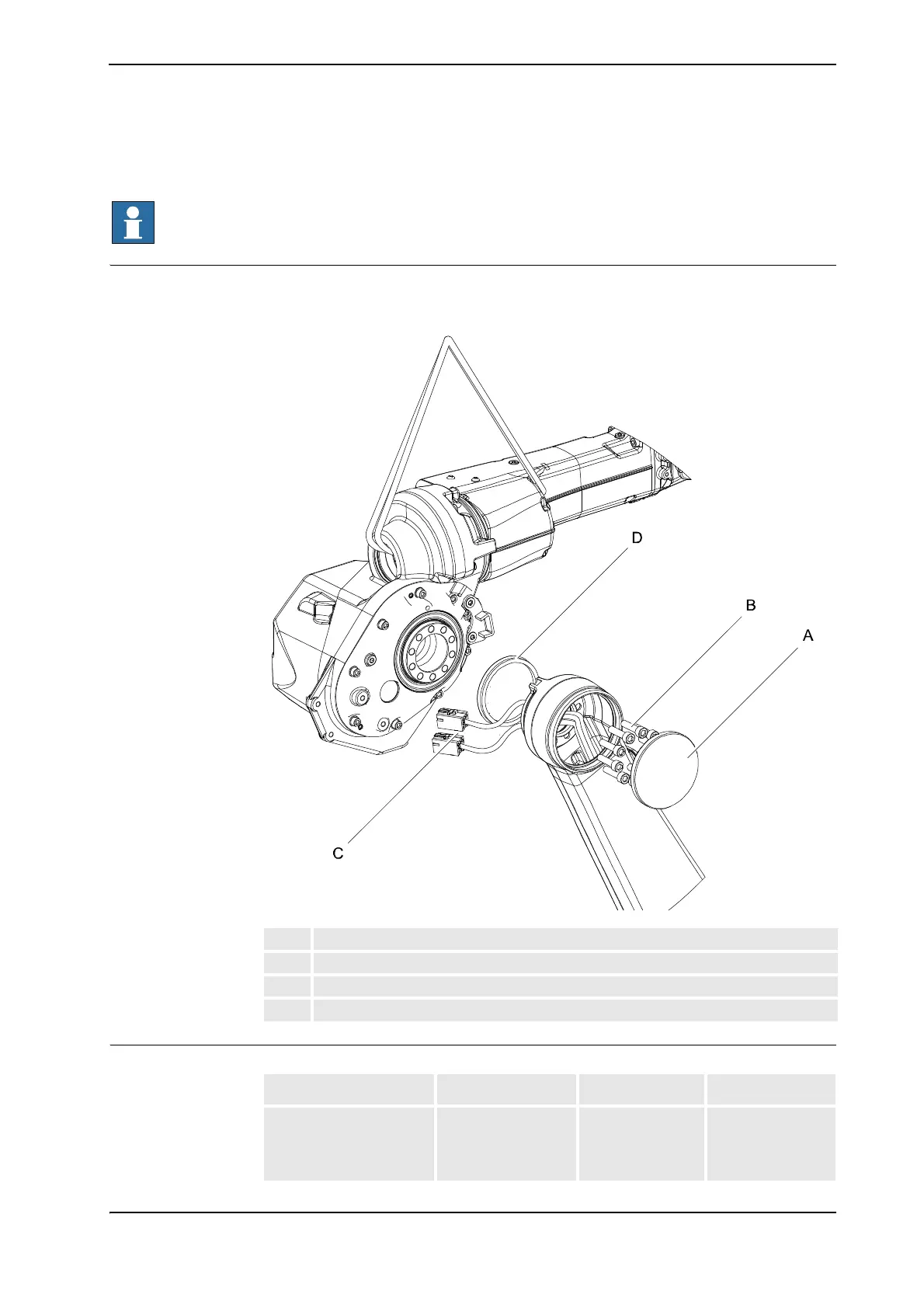
Location of upper arm
The complete upper arm is considered a spare part, including wrist, gearboxes and motors.
The figure below shows the location of the upper arm and connection to the lower arm.
xx0700000045
Required equipment
A VK -Cover
B Socket head cap screw M10x40
C Cable harness
D V-ring
Equipment Spare part no. Art. no. Note
Upper arm, spare Includes the wrist
unit. All gearboxes
are filled with oil at
delivery.
Continues on next page
 Loading...
Loading...







