2 Installation and commissioning
2.2.2. Working range
3HAC026660-001 Revision: C40
© Copyright 2006-2008 ABB. All rights reserved.
2.2.2. Working range
General
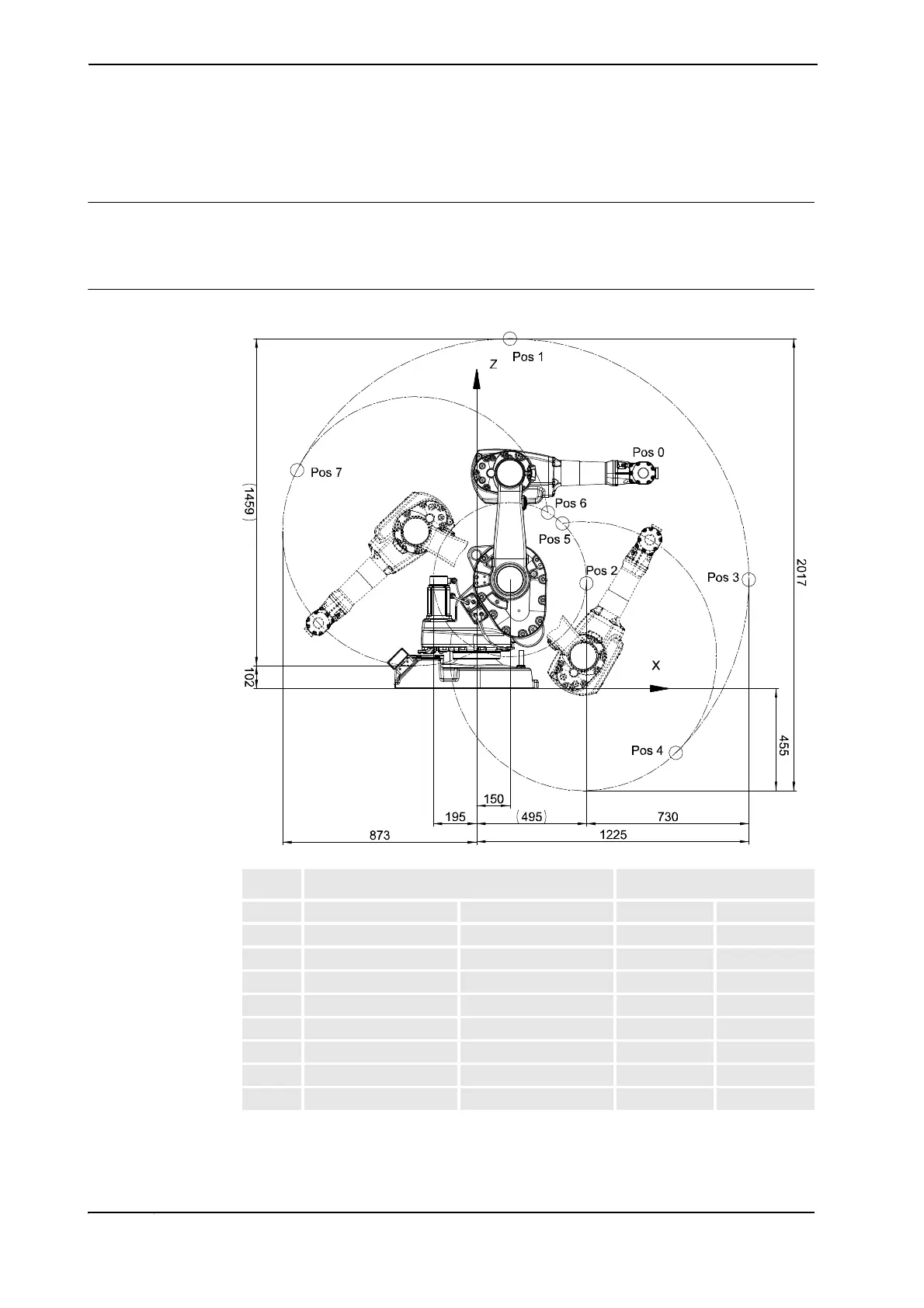
This section specifies the working ranges for the different robot models. The turning radius
is also shown separately in the last figure.
Illustration, working range IRB 1600 - x/1.2
xx0400001260
Pos Positions at wrist center (mm) Angle (degrees)
X Z axis 2 axis 3
0 750 961.5 0º 0º
1 150 1561.5 0º -90º
2 494 470 0º +55º
3 1225 486.5 +90º -90º
4 897 -287 +136º -90º
5 386 737 +136º -235º
6 321 786 -63º +55º
7 -808 975 -63º -90º
Continues on next page
 Loading...
Loading...







