2.2.2 Working range and type of motion
Working range
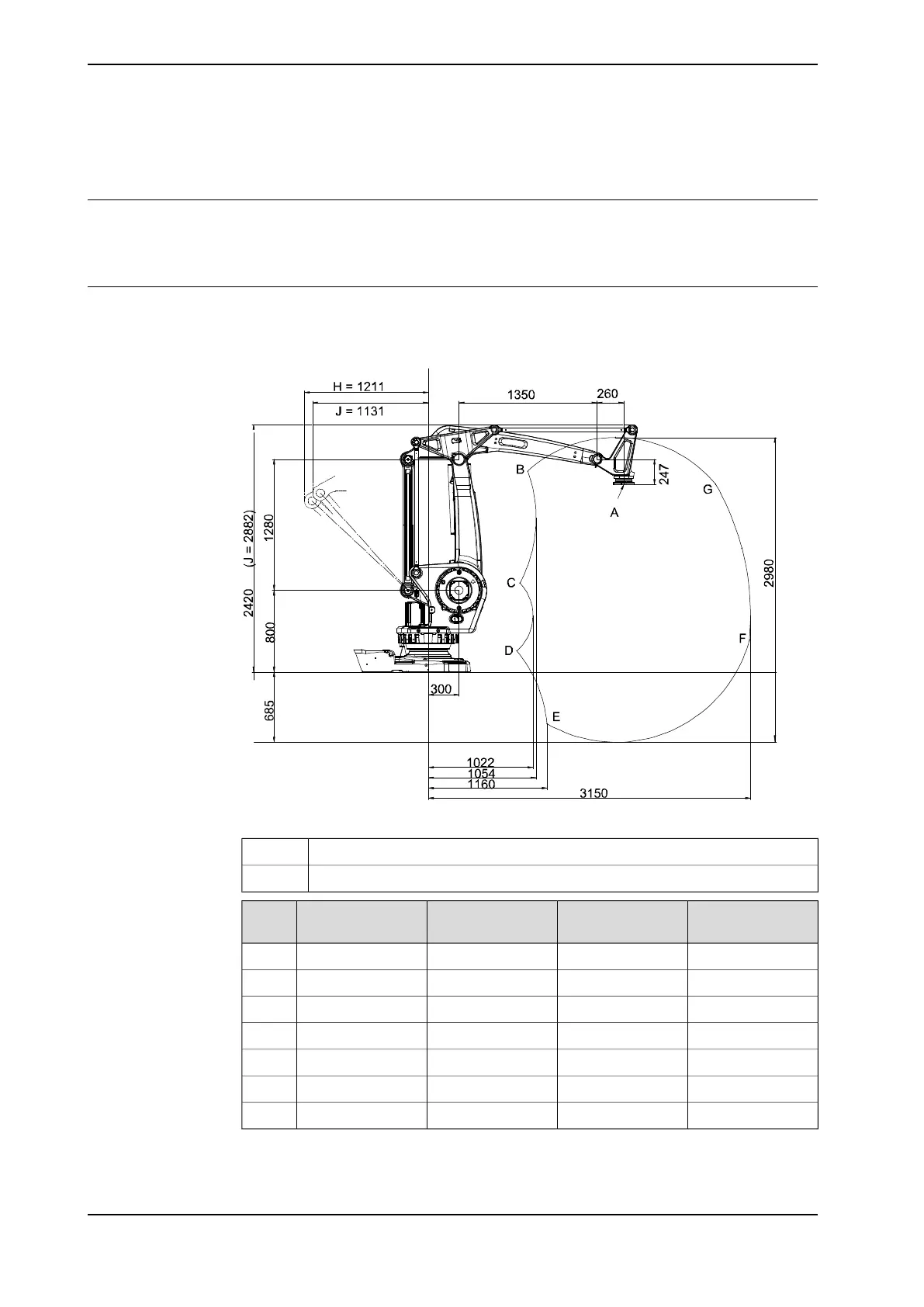
The following figures show the working ranges of the robot variants. The extreme
positions of the robot arm are specified at the wrist center (dimensions in mm).
IRB 660 - 180/3.15 and IRB 660 - 250/3.15
The illustration below shows the unrestricted working range of IRB 660 - 180/3.15
and IRB 660 - 250/3.15.
xx0500002274
Mechanical stopH
Max working rangeJ
Angle axis 3 (de-
grees)
Angle axis 2 (de-
grees)
Position z (mm)Position x (mm)
0018331910A
-20-421966972B
28-42870895C
12050207866D
12085-5051160E
15853153139F
-205018372809G
Continues on next page
46 Product manual - IRB 660
3HAC025755-001 Revision: W
© Copyright 2006-2020 ABB. All rights reserved.
2 Installation and commissioning
2.2.2 Working range and type of motion

 Loading...
Loading...






