8 Trouble Shooting
Product Manual, Control Cabinet IRC5P 3HNA009834-001 en Rev.06 187
8.3 Fault Symptoms and Malfunctions
8.3.13 Consistent Path Inaccuracy
Description The path of the robot TCP is consistently inaccurate.
Consequences Production is not possible.
Possible Causes • Robot not calibrated correctly.
• Robot TCP not correctly defined.
• Robot Base Frame, Object Frame or similar not correctly defined.
• Wrong robot type may be connected to the controller.
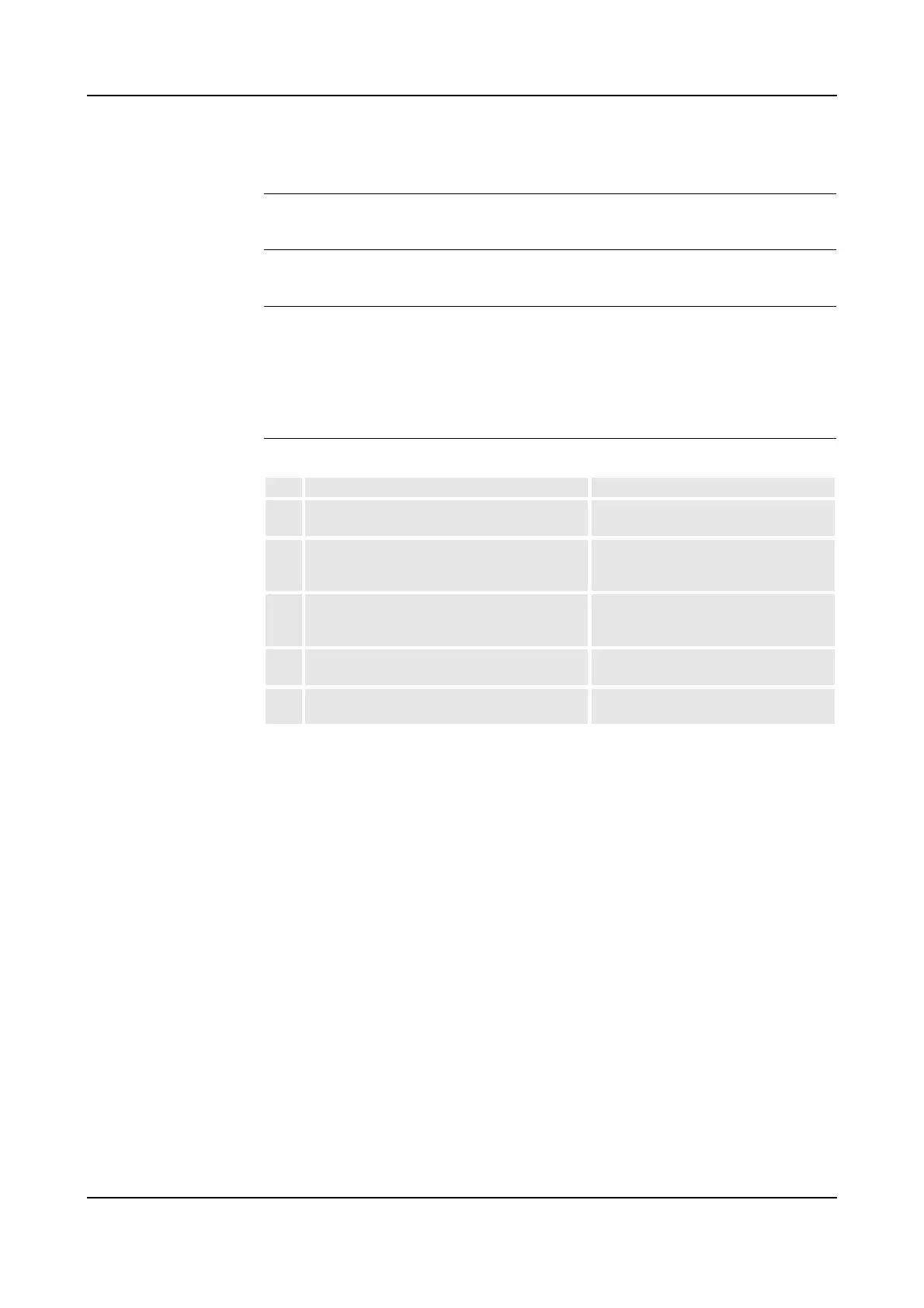
Recommended Actions
Step Action Comment
1 Make sure the robot Tool is correctly defined. How to define the TCP is described in
the ‘Operator's Manual, IRC5P’.
2 Check the revolution counter. If required, update revolution counter as
described in ‘Operator's Manual,
IRC5P’.
3 If required, re-calibrate the robot axes. Make sure the robot is calibrated as
described in ‘Operator's Manual,
IRC5P’.
4 Check that all Frames are correctly defined. How to configure frames is described in
‘Operator's Manual, IRC5P’.
4 Make sure the correct robot type is connected
as specified in the configuration files.

 Loading...
Loading...









