[SMB-66E]
- 44 -
2.7.15 Jogging procedure
2.7.15.1 Confirmation before starting jog operation
1) Gain adjustment confirmation
2) Confirmation of poor torque or the like caused by eccentric load
3) Confirmation of periphery of equipment (breakage of equipment during rotation in jog
mode, etc.)
2.7.15.2 Motion mode check
1) Servo-on
In case of servo-off, start the motion mode and turn the servo on.
2) Brake release
If the brake is applied, start the motion mode and release the brake.
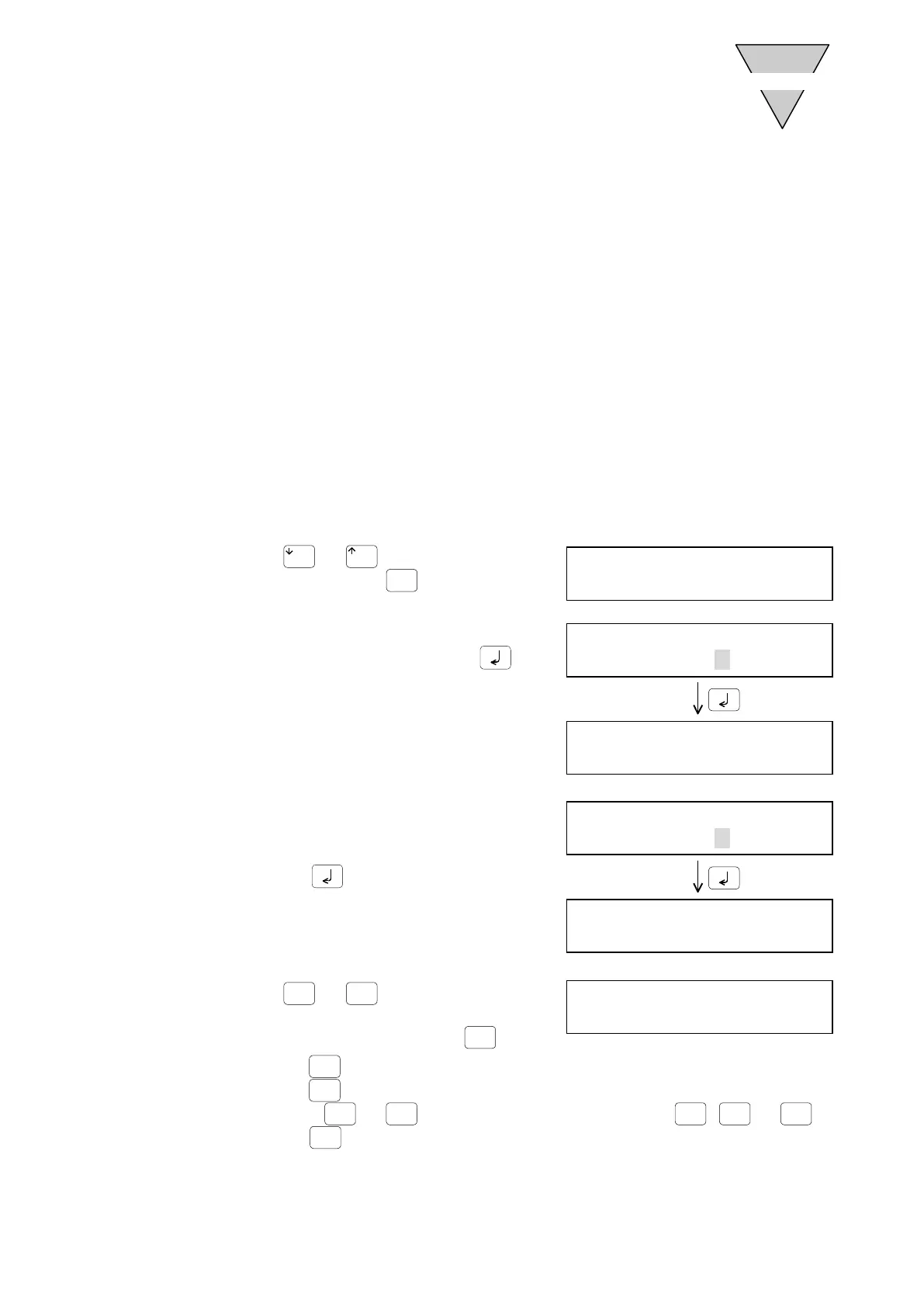
2.7.15.3 Jogging method
1) Press
or
until 2 JOG MODE" is
displayed, and press
.
2) Enter the jogging speed parameter (PRM14).
Enter the jogging speed and press
.
3) Enter the jog acceleration/deceleration time
parameter (PRM15).
Enter the jog acceleration/deceleration time
and press
.
4) Press
or
to select the direction
of rotation of jogging operation.
To exit from the jog mode, press
.
※
※※
※ While
is held down, "4 CCW" blinks and CCW rotation is caused.
While
is held down, "6 CW" blinks and CW rotation is caused.
Release
or
to return to the state ready to accept
,
or
.
Press
to exit from the jog mode to the motion menu and to start the automatic
operation mode (M1).
1HMERTN
2JOG MODE
JOG SPD
P14[ 2.00] RPM
*STORED*
P14[ 2.00] RPM
JOG LSPD
P15 [1.0] SEC
*STORED*
P15 [1.0] SEC
4:CCW 6:CW
0:END

 Loading...
Loading...