7 APPLICATION NOTES
Electrical InterMiCOM settings are contained within two columns; INTERMICOM C
OMMS and INTERMICOM CONF.
The INTERMICOM COMMS column contains all the settings needed to configure the communications, as well as the
channel statistics and diagnostic facilities. The INTERMICOM CONF column sets the mode of each command signal
and defines how they operate in case of signalling failure.
Short metallic direct connections and connections using fire-optic converters will generally be set to have the
highest signalling speed of 19200b/s. Due to this high signalling rate, the difference in operating time between the
direct, permissive, and blocking type signals is small. This means you can select the most secure signalling
command type (‘Direct’ intertrip) for all commands. You do this with the IM# Cmd Type settings. For these
applications you should set the IM# Fallback Mode to Default. You should also set a minimal intentional delay
by setting IM# FrameSyncTim to 10 msecs. This ensures that whenever two consecutive corrupt messages are
received, the command will immediately revert to the default value until a new valid message is received.
For applications that use Modem and/or multiplexed connections, the trade-off between speed, security, and
dependability is more critical. Choosing the fastest baud rate (data rate) to achieve maximum speed may appear
attractive, but this is likely to increase the cost of the telecommunications equipment. Also, telecommunication
services operating at high data rates are more prone to interference and suffer from longer re-synchronisation
times following periods of disruption. Taking into account these factors we recommend a maximum baud rate
setting of 9600 bps. As baud rates decrease, communications become more robust with fewer interruptions, but
overall signalling times increase.
At slower baud rates, the choice of signalling mode becomes significant. You should also consider what happens
during periods of noise when message structure and content can be lost.
● In ‘Blocking’ mode, the likelihood of receiving a command in a noisy environment is high. In this case, we
recommend you set IM# Fallback Mode to Default, with a reasonably long IM# FrameSyncTim setting.
Set IM# DefaultValue to ‘1’. This provides a substitute for a received blocking signal, applying a failsafe for
blocking schemes.
● In ‘Direct’ mode, the likelihood of receiving commands in a noisy environment is small. In this case, we
recommend you set IM# Fallback Mode to Default with a short IM# FrameSyncTim setting. Set IM#
DefaultValue to ‘0’. This means that if a corrupt message is received, InterMiCOM will use the default value.
This provides a substitute for the intertrip signal not being received, applying a failsafe for direct
intertripping schemes.
● In ‘Permissive’ mode, the likelihood of receiving a valid command under noisy communications conditions is
somwhere between that of the ‘Blocking’ mode and the ‘Direct’ intertrip mode. In this case, we
recommended you set IM# Fallback Mode to Latched.
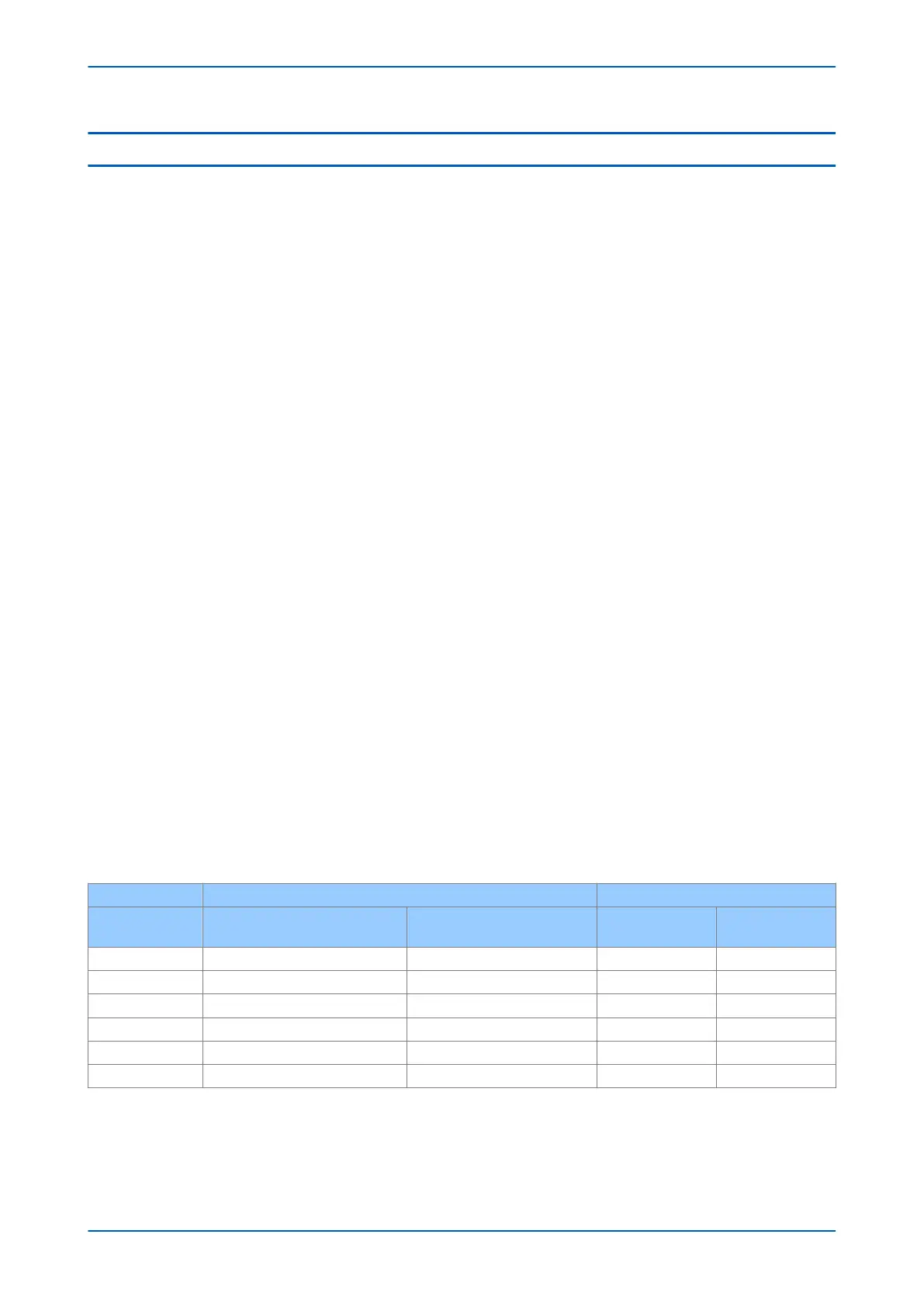
The table below presents recommended IM# FrameSyncTim settings for the different signalling modes and baud
rates:
Minimum Recommended "IM# FrameSyncTim" Setting
Baud Rate Direct Intertrip Mode Blocking Mode
Minimum Setting
(ms)
Maximum Setting
(ms)
600 100 250 100 1500
1200 50 130 50 1500
2400 30 70 30 1500
4800 20 40 20 1500
9600 10 20 10 1500
19200 10 10 10 1500
Chapter 17 - Electrical Teleprotection P14x
378 P14xEd1-TM-EN-1
 Loading...
Loading...



