ADV200 • Functions description and parameters list 147
When modifying PAR 680 Full scale speed, parameters PAR 3900 Dim factor num and PAR 3902 Dim factor den
are forced to 1.
Menu PAR Description UM Type FB BIT Def Min Max Acc Mod
22.15.1 3900 Dim factor num UINT16 1 1 65535 ERW FVS
Numerator dimension factor
Menu PAR Description UM Type FB BIT Def Min Max Acc Mod
22.15.2 3902 Dim factor den UINT16 1 1 65535 ERW FVS
Denominator dimension factor
Menu PAR Description UM Type FB BIT Def Min Max Acc Mod
22.15.3 3904 Dim factor text UINT32 7172210 0 0 ERW FVS
The unit of measure displayed for parameters expressed in user units is user denable but requires the use of
the congurator. The text of the unit of measure can contain up to a maximum of 4 characters.
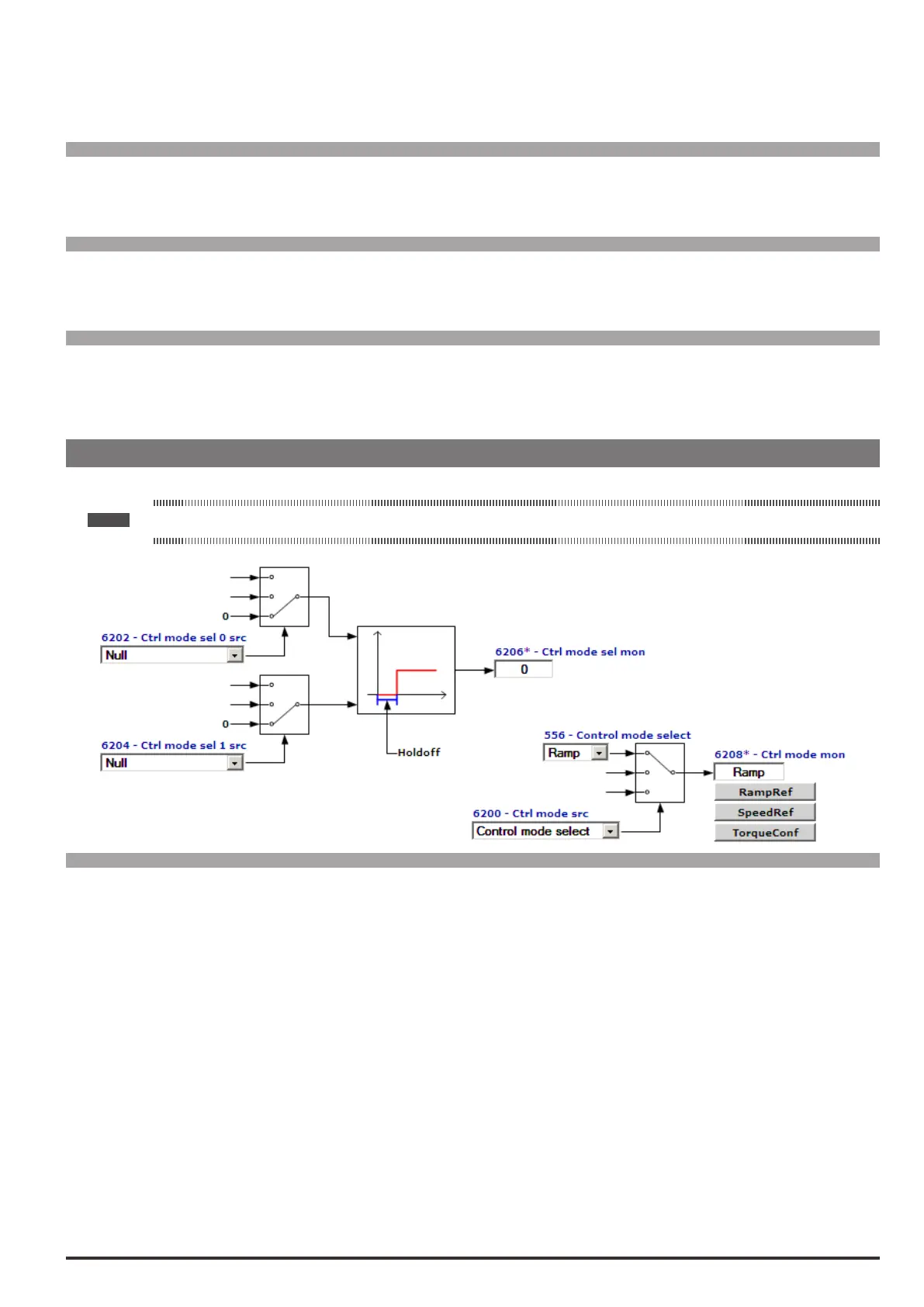
22.16 - FUNCTIONS/CONTROL MODE
Note! Function available only when PAR 552 Control mode select is set [1] Flux Vector CL or [2] Flux Vector OL.
Menu PAR Description UM Type FB BIT Def Min Max Acc Mod
22.16.1 556 Control mode select ENUM Ramp 0 2 ERWZ F_S
Selection of the drive control mode.
0 Torque
1 Speed
2 Ramp
In torque control (0 - Torque) the reference and load of the motor determine its speed and direction of rota-
tion. Symmetrical torque limits can be set, for each direction of rotation and for motor/generator operation. This
type of control is only available in the Flux vector CL control mode. In this mode the Ramp function is not used
to generate the drive speed reference so it can be used in stand-alone mode.
In speed control (1 - Speed) the reference arrives straight after the ramp circuit, enabling an extremely rapid
response to signal variations. This is ideal for applications that require a highly dynamic response. This type of
control is available in the Flux vector CL and Flux vector OL control modes. In this mode the Ramp function
is not used to generate the drive speed reference so it can be used in stand-alone mode.
In control with ramp (2 - Ramp) the speed reference is applied to the input of the “Ramp” block and is pro-
duced by the “Ramp ref” block. This allows setting of both the acceleration/deceleration times and the ramp
 Loading...
Loading...











