120 ADV200 • Functions description and parameters list
22.6 – FUNCTIONS/MOTOR OVERLOAD
The overload control function provides integrator logic to protect the motor against thermal overload. This protection
presents the characteristic I²t behaviour and is an emulation of the thermal relay of the motor controlled by the ADV drive.
When the function is enabled, the value reached by the integrator is stored each time the drive is switched off. The
saved value is restored each time the drive is switched on.
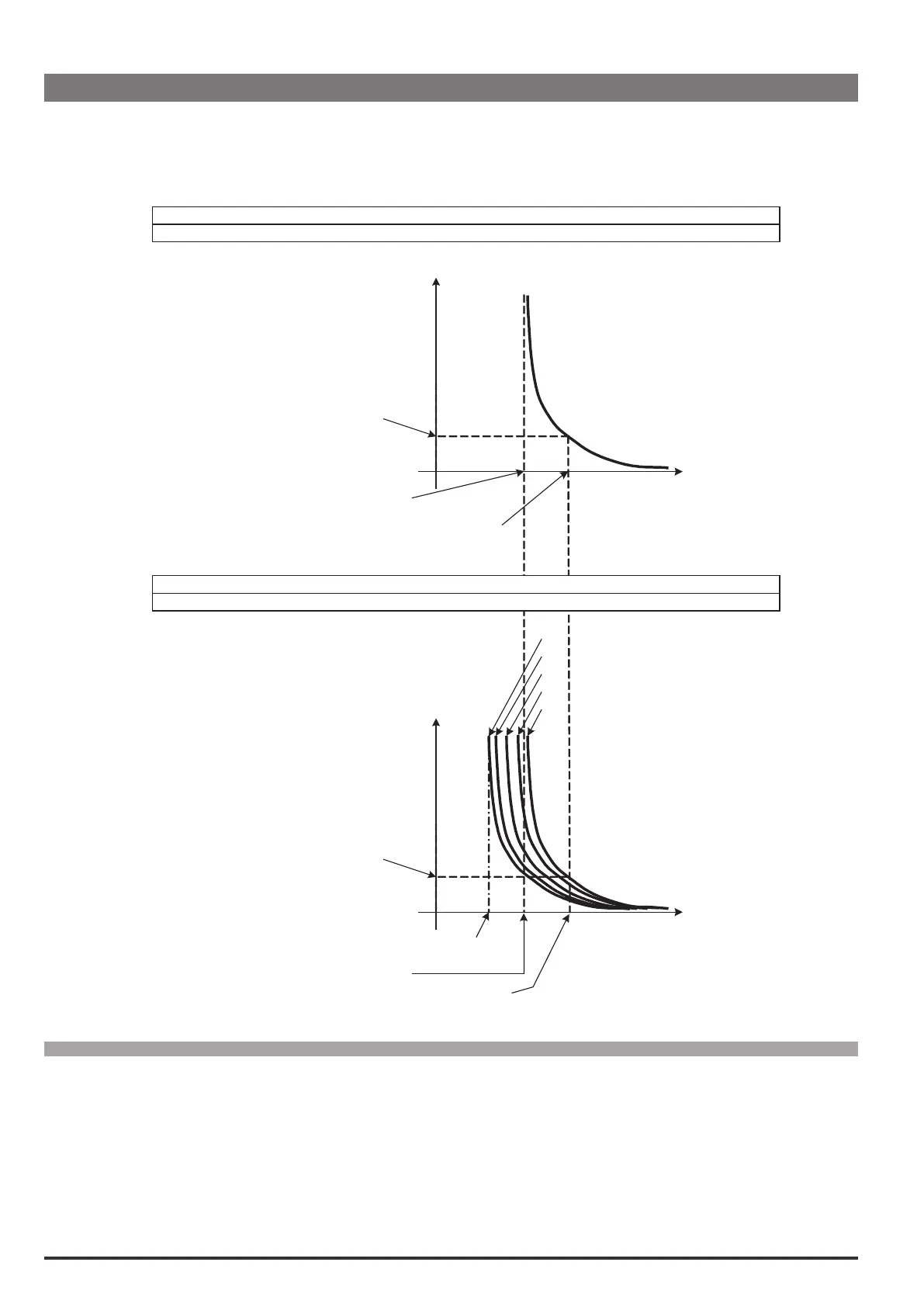
Time [s]
Motor current[A]
(PAR 2002 Rated Current)*(PAR 3206 Motor service factor)
(PAR 2002 Rated Current)*(PAR )*(PAR 3202 Motor ovld factor)3206 Motor service factor
PAR 3204 Motor ovld time
Time [s]
Motor current[A]
(PAR 260 Motor speed = 0)
I2tm Overload time –PAR 3216 Motor Fan type = (1) Servo fan
I2tm Overload time - PAR 3216 Motor Fan type = (0) Auto fan - PAR 260 Motor speed > PAR 2004 Rated Speed
(PAR 260 Motor speed = (PAR 2004 Rated Speed/2)) * 25 / 100
(PAR 260 Motor speed = (PAR 2004 Rated Speed/2)) * 75 / 100
(PAR 260 Motor speed = (PAR 2004 Rated Speed/2))
(PAR 260 Motor speed = (PAR 2004 Rated Speed/2)) * 50 / 100
PAR 3204 Motor ovld time
(PAR 2002 Rated Current)*(PAR 3206 Motor service factor)
(PAR 2002 Rated Current)*(PAR )*(PAR 3202 Motor ovld factor)3206 Motor service factor
(PAR 2002 Rated Current)*( )*(PAR 3218 Motor derat factor)3206Motor service factor
I2tm Overload time –PAR 3216 Motor Fan type = (1) Servo fan
I2tm Overload time - PAR 3216 Motor Fan type = (0) Auto fan - PAR 260 Motor speed > PAR 2004 Rated Speed
Menu PAR Description UM Type FB BIT Def Min Max Acc Mod
22.6.1 3200 Motor ovld enable BIT 0 0 1 ERW FVS
Enabling of the motor overload control.
0 Disable
1 Enable
If set to 0 the MOTOR OVERLOAD function is disabled.
If set to 1 the MOTOR OVERLOAD function is enabled.
 Loading...
Loading...











