ADV200 • Functions description and parameters list 155
22.20 - FUNCTIONS/TORQUE LIMADAPT
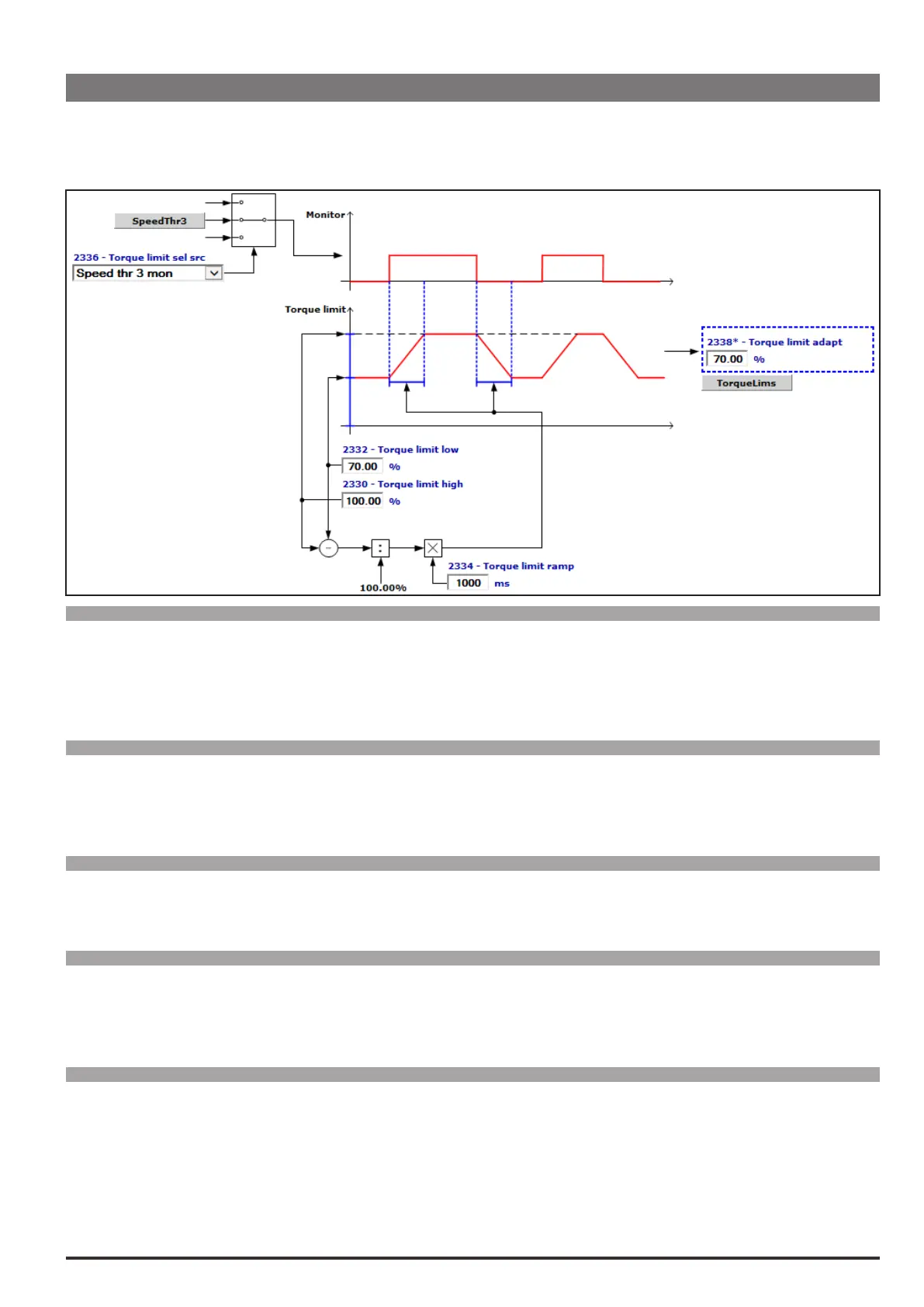
These menu parameters let you manage the drive torque limits dynamically based on On/Off conditions, for example,
motor speed (above or below a threshold).
Menu PAR Description UM Type FB BIT Def Min Max Acc Mod
22.20.1 2330 Torque limit high perc FLOAT 100.0 0.0 CALCF ERW F_S
Setting of high torque limit.
If this parameter is set to a value lower than IPA 2332 Torque limit low, IPA 2332 is automatically changed to
such value.
Menu PAR Description UM Type FB BIT Def Min Max Acc Mod
22.20.2 2332 Torque limit low perc FLOAT 70.0 0.0 CALCF ERW F_S
Setting of low torque limit.
Cannot be higher than the value set in parameter IPA 2330 Torque limit high.
Menu PAR Description UM Type FB BIT Def Min Max Acc Mod
22.20.3 2334 Torque limit ramp ms UINT16 1000 0 60000 ERW F_S
Setting of time to go linearly from 0 to 100% of nominal torque.
Menu PAR Description UM Type FB BIT Def Min Max Acc Mod
22.20.4 2336 Torque limit sel src LINK 16/32 976 0 16384 ERW F_S
Selection of source to be used to manage the adaptive torque limit:
The list of signals assignable to the function can be selected from the “L_DIGSEL1” selection list.
Menu PAR Description UM Type FB BIT Def Min Max Acc Mod
22.20.5 2338 Torque limit adapt perc FLOAT 0.0 0.0 0.0 ER F_S
Adaptive torque limit in percentage, calculated internally by the drive based on the monitor parameter selected
in parameter IPA 2336 Torque limit sel src.
If the monitor parameter equals 0, IPA 2338 goes to the value of Torque limit low
If the monitor parameter equals 1, IPA 2338 goes to the value of IPA 2330 Torque limit high.
 Loading...
Loading...











