6 7
KEB COMBIVERT F5
16
Name: Basis
04.05.04
Chapter Section Page Date
© KEB Antriebstechnik, 2002
All rights reserved
Functional Description Protective Functions
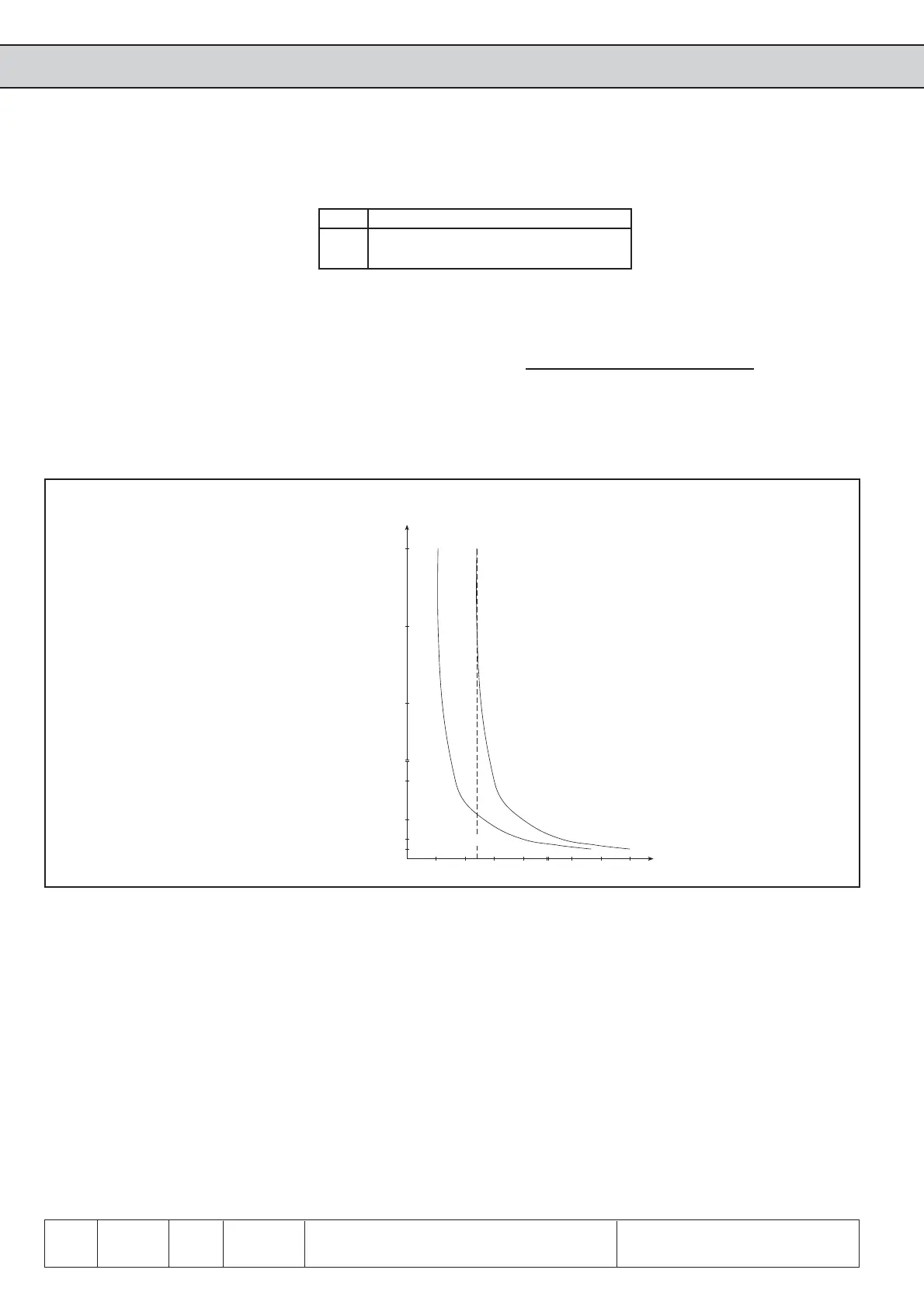
50 100 150 200 400 600 800
%
5 sec
30 sec
1 min
2 min
30 min
60 min
120 min
120
f = 0 Hz
Tripping time
Motor current
f ≥ Rated motor frequency or
forced-ventilated motor
Fig. 6.7.8.b Tripping times for F5-B, F5-G and F5-M
For self-ventilated motors the
tripping times decrease with the
frequency of the motor (see picture).
The motor protective function acts in-
tegrating, i.e. times with overload on
the motor are added, times with
underload are substracted. After
triggering the motor protective
function, the new tripping time is
reduced to 1/4 of the specified value,
if the motor has not been operated
for an appropriate time with
underload.
Motor protection / rated
current (dr.12)
This parameter specifies for each set the rated current (= 100% utilization) for the
motor protective function. The motor protection-load is calculated as follows:
Inverter Apparent current(ru.15)
Motor protection-load =
Motor protection rated current (dr.12)
The cooling mode of the motor is adjusted with these programmable parameters.
Value Function
0 Separate cooling (default)
1 Self-cooling
Motor protection mode
(dr.11)
OH2 stopping mode (Pn.14)
This parameter determines the behaviour of the drive when the motor protective
function responses. The function is described in Chapter 6.7.6.
 Loading...
Loading...










