37 / 109Issued: 11.10.2013 Version: KST VisionTech 2.1 V1
9 Start-up and recommissioning
9 Start-up and recommissioning
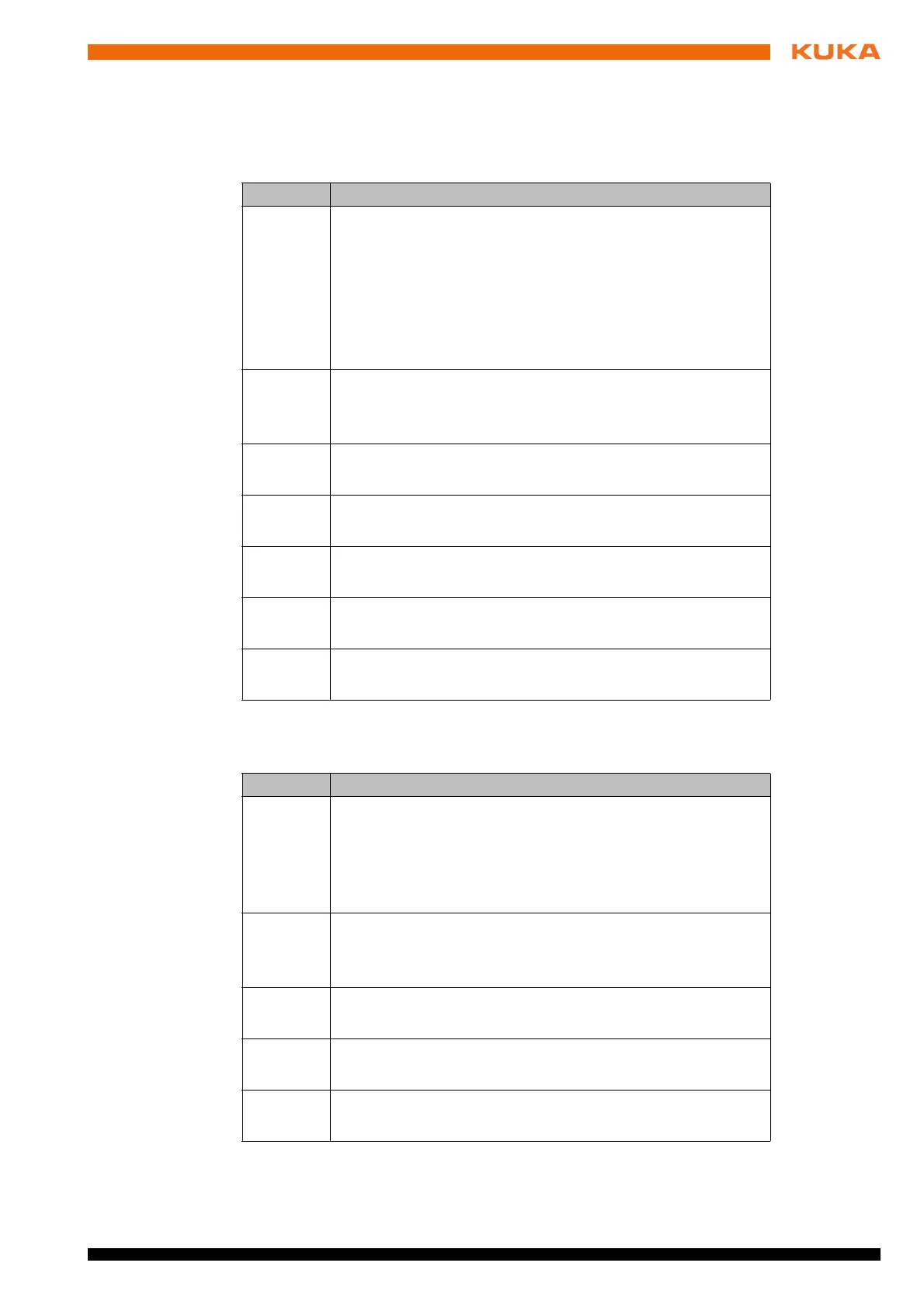
9.1 Start-up for a stationary camera - overview
9.2 Start-up for moving cameras - overview
Step Description
1 Connect camera to the robot controller.
(>>> 9.3.1 "Networking KR C4 with interface X64, stationary"
Page 38)
(>>> 9.3.2 "Networking KR C4 with cable inlet, stationary"
Page 38)
(>>> 9.3.3 "Networking KR C4 compact, stationary"
Page 39)
2 Refresh the sensor overview.
1. In the main menu, select VisionTech > Sensor overview.
2. Press Refresh sensors.
3 Configure Ethernet KRL interface.
(>>> 9.4 "Configuring the Ethernet KRL interface" Page 43)
4 Configure the camera network.
(>>> 9.5 "Configuring the camera network" Page 43)
5 Configure the camera.
(>>> 9.6 "Configuring cameras" Page 44)
6 Align the camera.
(>>> 9.7 "Aligning camera (stationary)" Page 45)
7 Calibrate the camera.
(>>> 9.9 "Calibrating camera (stationary)" Page 46)
Step Description
1 Connect camera to the robot controller.
(>>> 9.3.4 "Networking KR C4 with interface X64, robot-
guided" Page 39)
(>>> 9.3.5 "Networking KR C4 with cable inlet, robot-guided"
Page 40)
2 Refresh the sensor overview.
1. In the main menu, select VisionTech > Sensor overview.
2. Press Refresh sensors.
3 Configure Ethernet KRL interface.
(>>> 9.4 "Configuring the Ethernet KRL interface" Page 43)
4 Configure the camera network.
(>>> 9.5 "Configuring the camera network" Page 43)
5 Configure the cameras.
(>>> 9.6 "Configuring cameras" Page 44)
 Loading...
Loading...


