40 / 109 Issued: 11.10.2013 Version: KST VisionTech 2.1 V1
KUKA.VisionTech 2.1
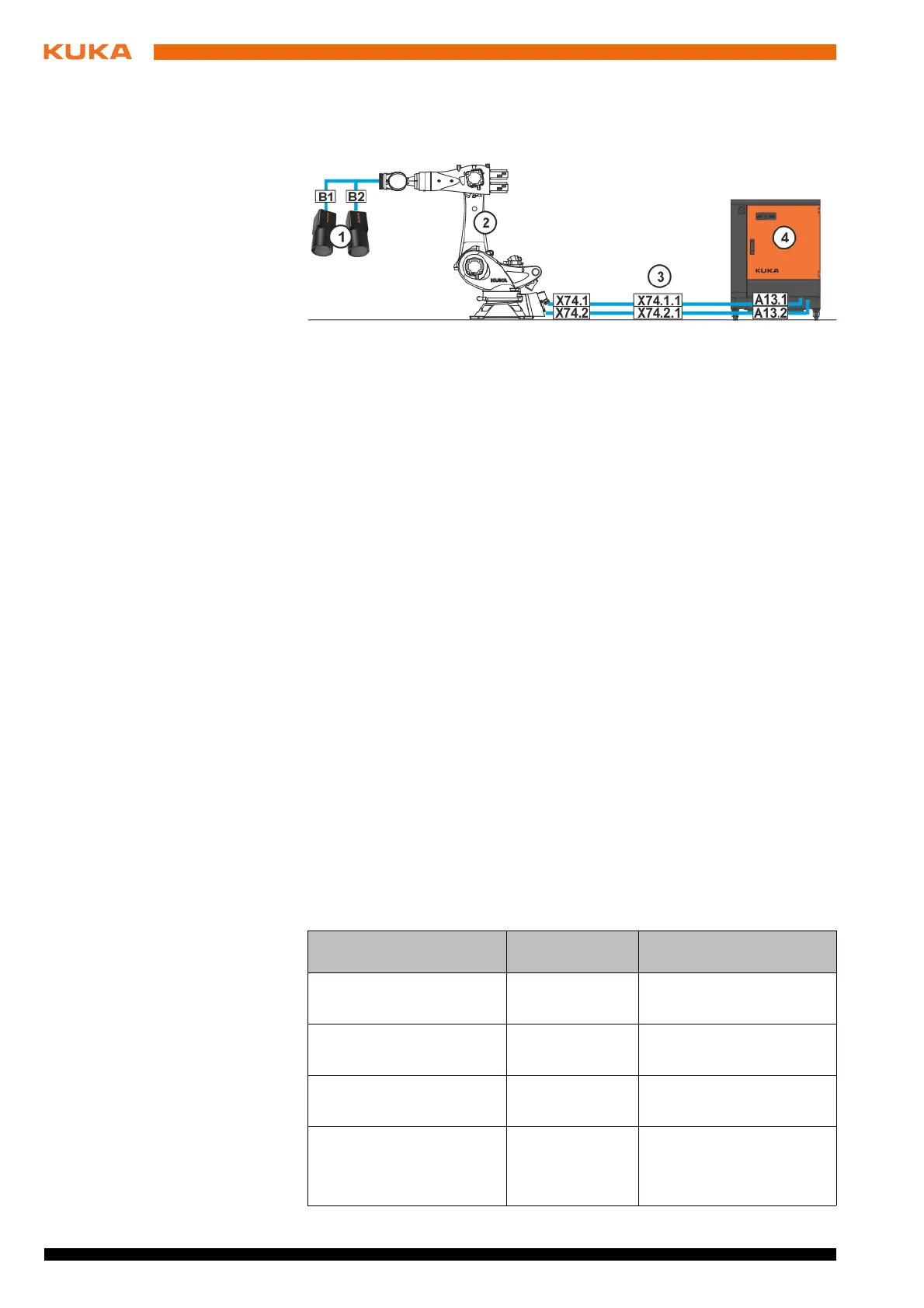
9.3.5 Networking KR C4 with cable inlet, robot-guided
Procedure
Carry out networking as illustrated below:
9.3.6 Description of the connecting cables
Configuration The connecting cables are used to transfer power and signals between the ro-
bot controller, linear unit, robot and cameras.
The following connecting cables are available:
For the KR C4 with interface X64:
Connecting cable, KR C4 – linear unit
Connecting cable, linear unit – robot
Connecting cable, KR C4 – robot
Connecting cable, KR C4 – camera
For the KR C4 with cable inlet to interface A13 on the switch:
Connecting cable, switch – linear unit
Connecting cable, linear unit – robot
Connecting cable, switch – robot
Connecting cable, switch – camera
For the KR C4 compact:
Connecting cable, KR C4 compact – switch
Connecting cable, switch – camera
Interfaces, KR C4 For connection of the connecting cables between the KR C4, linear unit, robot
and cameras, the following connectors are available at the interfaces:
Fig. 9-5: Networking KR C4 with cable inlet, robot-guided
1 KUKA MXG20 camera 3 Linear unit (optional)
2 Robot 4 KR C4
Connecting cable Connector des-
ignation
Connections
KR C4 – linear unit X64.1 – X74.1.1
X64.2 – X74.2.1
PushPull V4 connector at
both ends
Linear unit – robot X74.1.1 – X74.1
X74.2.1 – X74.2
PushPull V4 coupling –
PushPull V4 connector
KR C4 – robot X64.1 – X74.1
X64.2 – X74.2
PushPull V4 connector at
both ends
KR C4 – camera X64.1 – B1
X64.2 – B2
X64.3 – B3
PushPull V4 connector –
M12 male connector, 8-
contact
 Loading...
Loading...


