48 / 109 Issued: 11.10.2013 Version: KST VisionTech 2.1 V1
KUKA.VisionTech 2.1
13. Press Save. The settings are saved.
14. Press Exit. The window closes.
9.9.1 Deleting a calibration plane
Procedure 1. In the main menu, select VisionTech > Calibration management.
2. In the Serial number box, select the camera used to create the calibration
plane.
3. In the Calibration result box, select the plane that was deleted.
4. Press Delete. The calibration plane is deleted. If the calibration plane was
used in a task, the task can no longer be executed.
9.10 Calibrating cameras (moving)
Precondition The cameras are mounted on the robot flange and configured as moving.
The cameras are networked.
The network has been configured.
The cameras are aligned.
A calibration plate is mounted and is located in the field of vision of the
cameras.
The NULLFRAME tool is selected.
Procedure 1. In the main menu, select VisionTech > Calibration.
Freeze-frame images from the cameras are displayed on the moving sen-
sors tab. The freeze-frame images of the cameras that have already been
calibrated have a green frame. In the case of cameras that have not yet
been calibrated, the freeze-frame images have a red frame.
2. Select the cameras that are to be calibrated by pressing the freeze-frame
images.
3. Press Calibration Wizard.
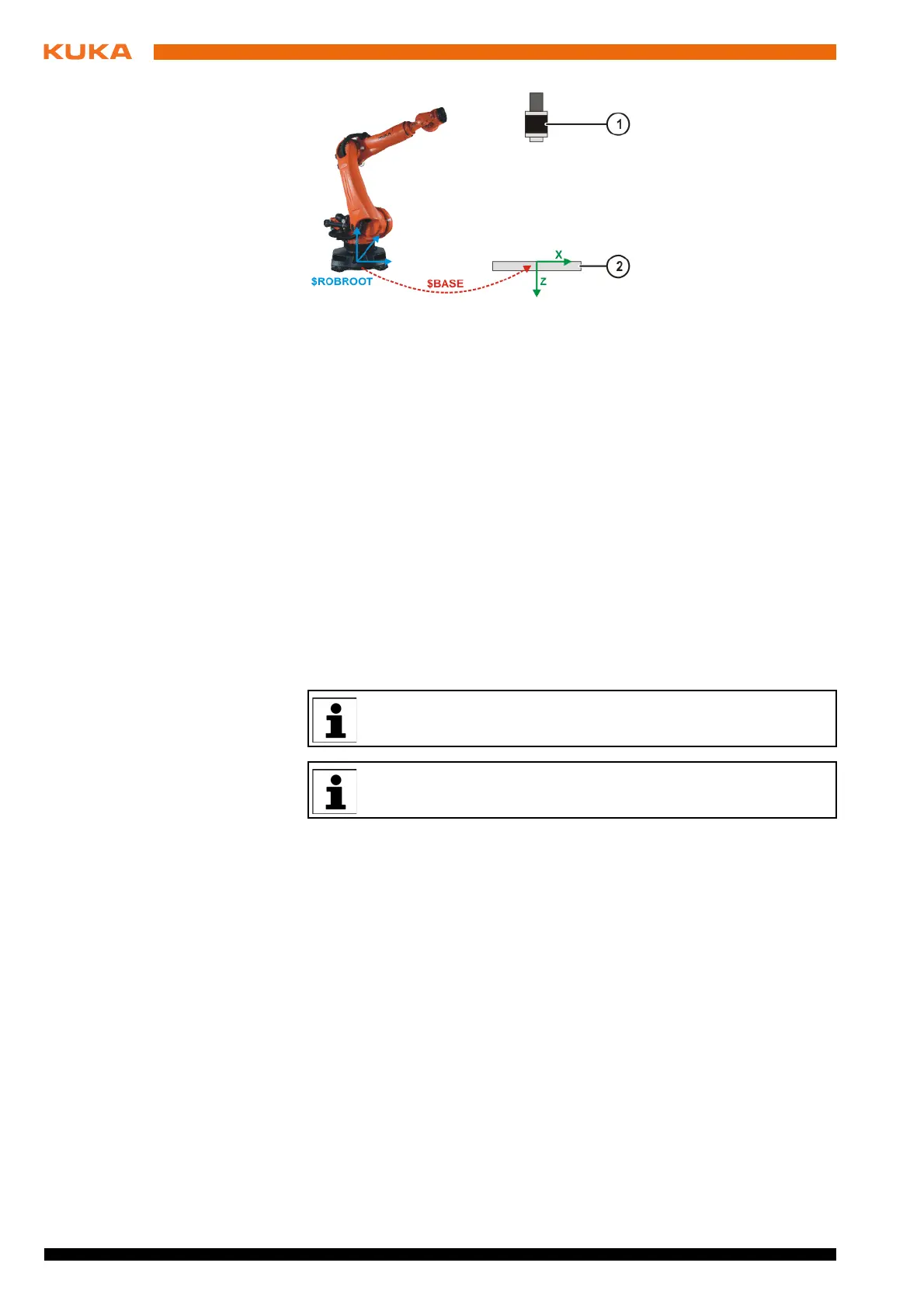
Fig. 9-17: Base for a stationary camera
1 Stationary camera 2 Calibration plate
If a palletizing robot is used, it is not possible to calibrate moving (ro-
bot-guided) cameras.
During calibration, the IP addresses of cameras must not be
changed.
 Loading...
Loading...


