74 / 109 Issued: 11.10.2013 Version: KST VisionTech 2.1 V1
KUKA.VisionTech 2.1
Explanation of
the syntax
Example
All points (relative to the robot flange) in base 16 that lie within the following
values are valid:
X value: max. 700 mm
Y value: max. 950 mm
Z value: max. 900 mm
The gripping point is in base 11 and taught with tool 1.
11.14.1 Defining the points on the robot
Preparation 1. Open the file ConfigMon.ini in the directory D:\KUKA_OPT\VisionTech\IN-
TERNAT\KRCSETUP\UTIL.
2. Copy sections [Group1] and [Group2].
3. Open the file ConfigMon.ini in the directory C:\KRC\USER.
4. Insert the copied sections under the existing group sections.
5. Adapt the index numbers. If, for example, the sections [Group1] to
[Group3] already exist, rename the new sections as [Group4] and
[Group5].
6. Save and close the file.
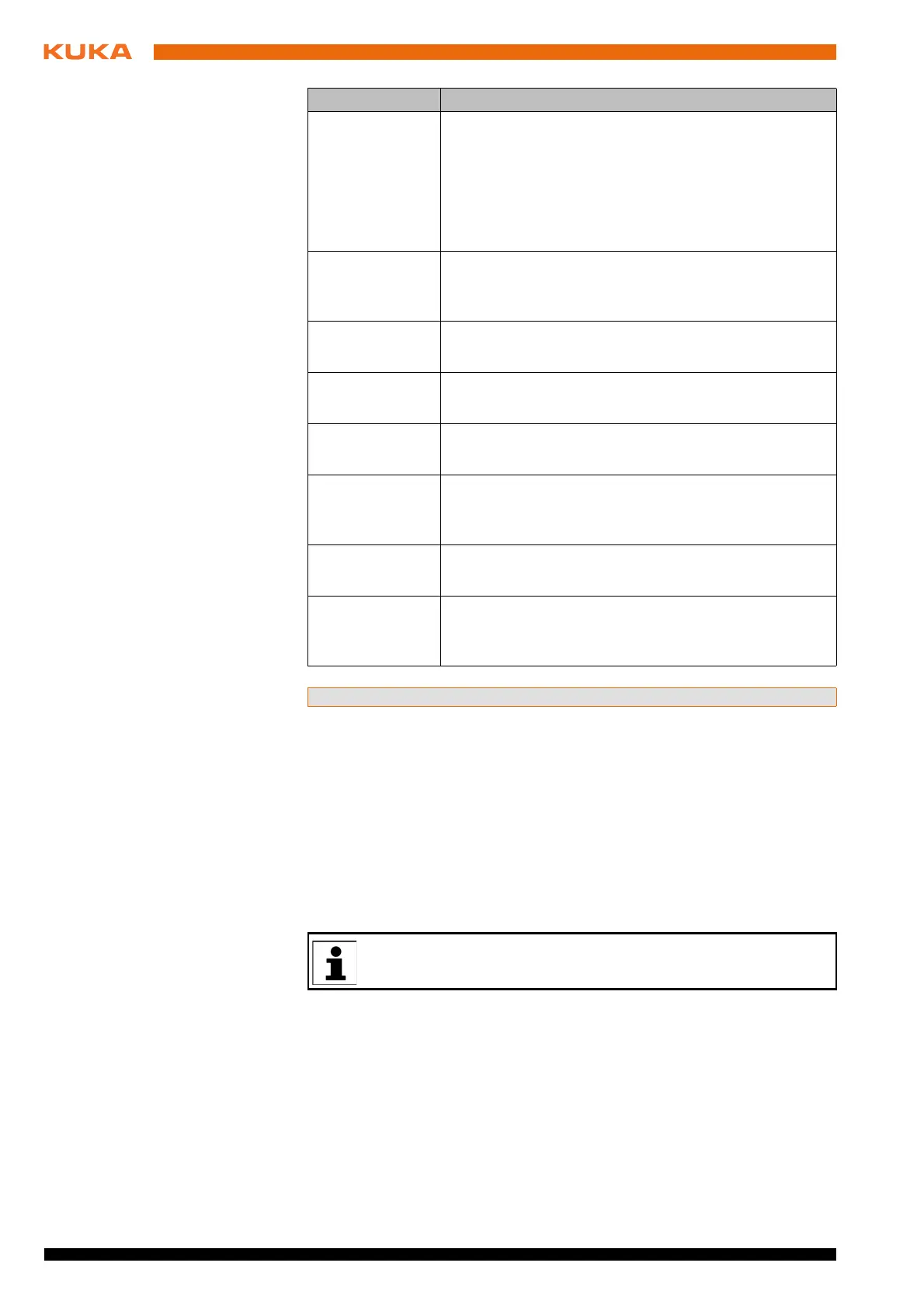
Element Description
RET Return value
Type: BOOL
TRUE: All points defined by the user lie within the
defined limit values.
FALSE: The limit value of at least one point has
been exceeded.
Base of the area
Number of the base within which the point to be
checked must lie
Type: INT (IN)
Limit value X
Maximum limit value of the base in X direction
Type: INT (IN)
Limit value Y
Maximum limit value of the base in Y direction
Type: INT (IN)
Limit value Z
Maximum limit value of the base in Z direction
Type: INT (IN)
Base of the grip-
ping point
Number of the base in which the component must be
gripped
Type: INT (IN)
Gripping point
Point at which the component is gripped
Type: FRAME (IN)
Tool
Number of the tool with which the component must be
gripped
Type: INT (IN)
RET = VT_CHECKPOSE(16,700,950,900,11,XGrippingPos,1)
Preparation only needs to be carried out once after installation.