72 / 109 Issued: 11.10.2013 Version: KST VisionTech 2.1 V1
KUKA.VisionTech 2.1
Syntax RET = VT_CHECKPOSELIMIT("Robot pose", "Frame", "Offset")
Explanation of
the syntax
11.14 Subprogram VT_CHECKPOSE
Description The subprogram VT_CHECKPOSE checks whether points on the robot de-
fined by the user lie within an area defined by the user. The points on the robot
defined by the user are defined relative to the robot flange. Up to 10 points can
be defined.
(>>> 11.14.1 "Defining the points on the robot" Page 74)
It must be possible for all defined points to be addressed by the robot in the
NULLFRAME base and with the NULLFRAME tool. If a point is located outside
of the robot’s workspace, the robot stops.
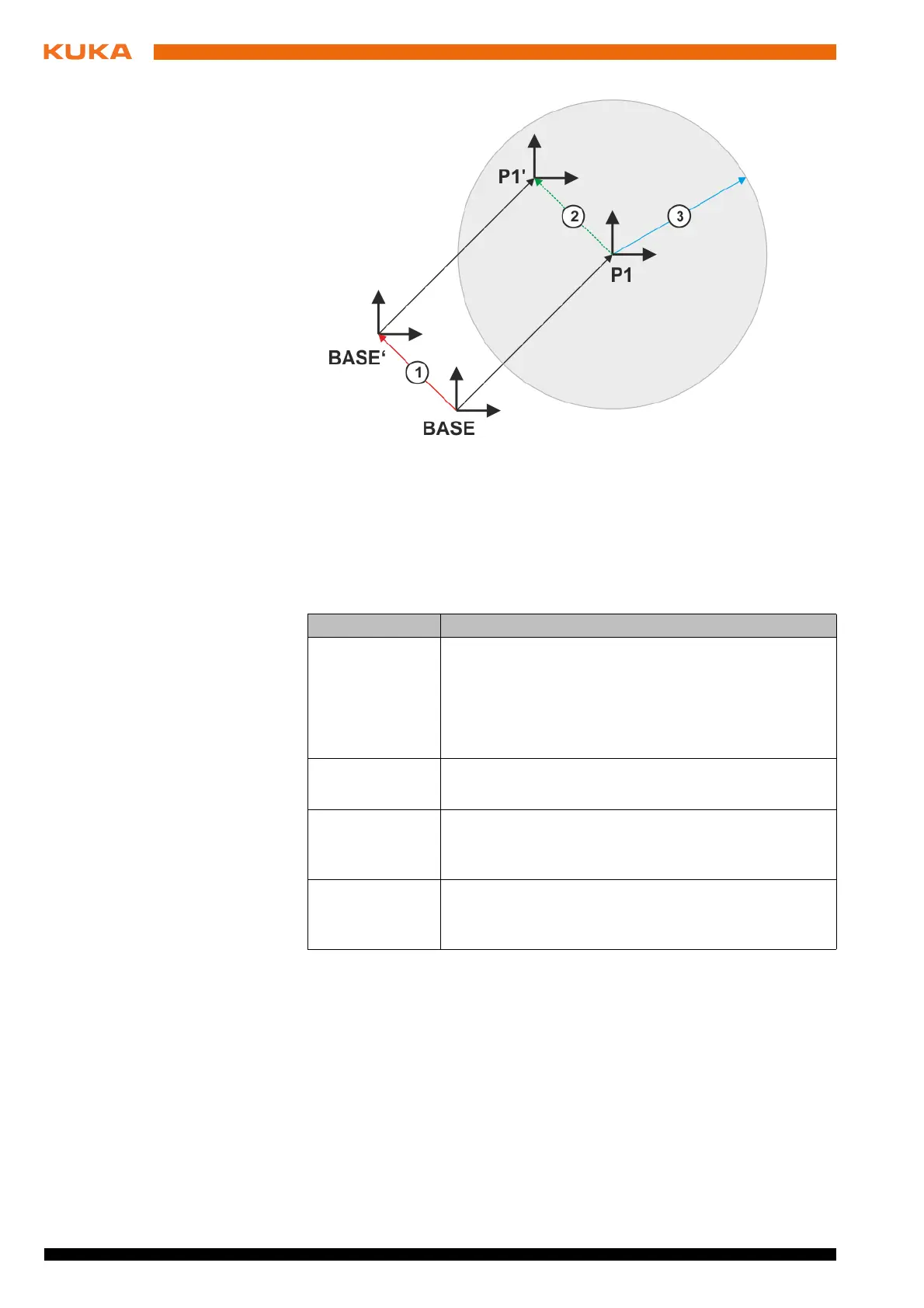
Fig. 11-1: Base correction with VT_CHECKPOSELIMIT
1 Base correction
2 Offset of point P1 due to the base correction
3 Radius (limit value)
Element Description
RET Return value
Type: BOOL
TRUE: The target robot pose lies within the defined
limit range.
FALSE: The limit value is exceeded.
Robot pose
The robot pose to be checked
Type: FRAME (IN)
Frame
Frame returned by the function
GET_VTCORRECTIONFRAME
Type: FRAME (IN)
Offset
Maximum offset between the original robot pose and
the robot pose in the new workpiece base in mm
Type: REAL (IN)