38 / 109 Issued: 11.10.2013 Version: KST VisionTech 2.1 V1
KUKA.VisionTech 2.1
9.3 Connecting cameras to the robot controller
Description The cameras are connected via Ethernet; the networking differs depending on
the robot controller used and the mounting type of the cameras.
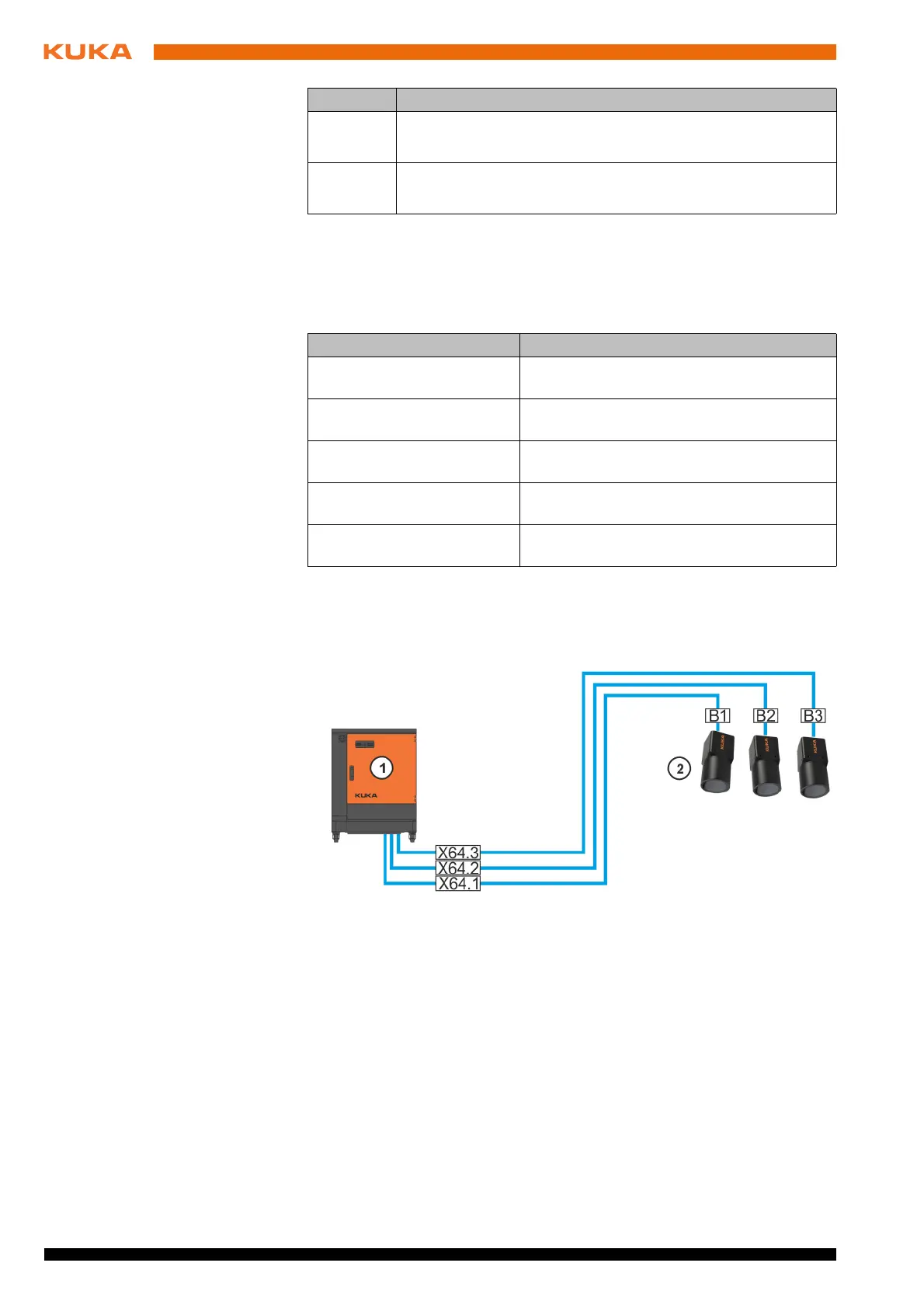
9.3.1 Networking KR C4 with interface X64, stationary
Procedure
Carry out networking as illustrated below:
9.3.2 Networking KR C4 with cable inlet, stationary
Procedure
Carry out networking as illustrated below:
6 Align the cameras.
(>>> 9.8 "Aligning cameras (moving)" Page 45)
7 Calibrate the cameras.
(>>> 9.10 "Calibrating cameras (moving)" Page 48)
Step Description
Variant Description
KR C4 with interface X64,
robot-guided
(>>> 9.3.4 "Networking KR C4 with inter-
face X64, robot-guided" Page 39)
KR C4 with cable inlet,
robot-guided
(>>> 9.3.5 "Networking KR C4 with cable
inlet, robot-guided" Page 40)
KR C4 with interface X64,
stationary
(>>> 9.3.1 "Networking KR C4 with inter-
face X64, stationary" Page 38)
KR C4 with cable inlet, sta-
tionary
(>>> 9.3.2 "Networking KR C4 with cable
inlet, stationary" Page 38)
KR C4 compact, stationary (>>> 9.3.3 "Networking KR C4 compact,
stationary" Page 39)
Fig. 9-1: Networking KR C4 with interface X64, stationary (maximum
number of cameras)
1 KR C4 2 KUKA MXG20 camera
 Loading...
Loading...


