61 / 109Issued: 11.10.2013 Version: KST VisionTech 2.1 V1
10 Configuration
10.8 Testing a 2D task
Precondition The task has been configured.
The model has been generated.
The base is the same as was used for model generation.
Only with use of a moving camera: the NULLFRAME tool is selected.
Procedure 1. In the main menu, select VisionTech > Task configuration.
2. Only with use of a moving camera: move the robot to the reference pose.
3. In the Task area, press Test.
The test is carried out and a result window is displayed.
4. The images in the result window can be enlarged. To do so, press the de-
sired image once.
If user data from the tool block have been transferred, they are displayed
beneath the enlarged image.
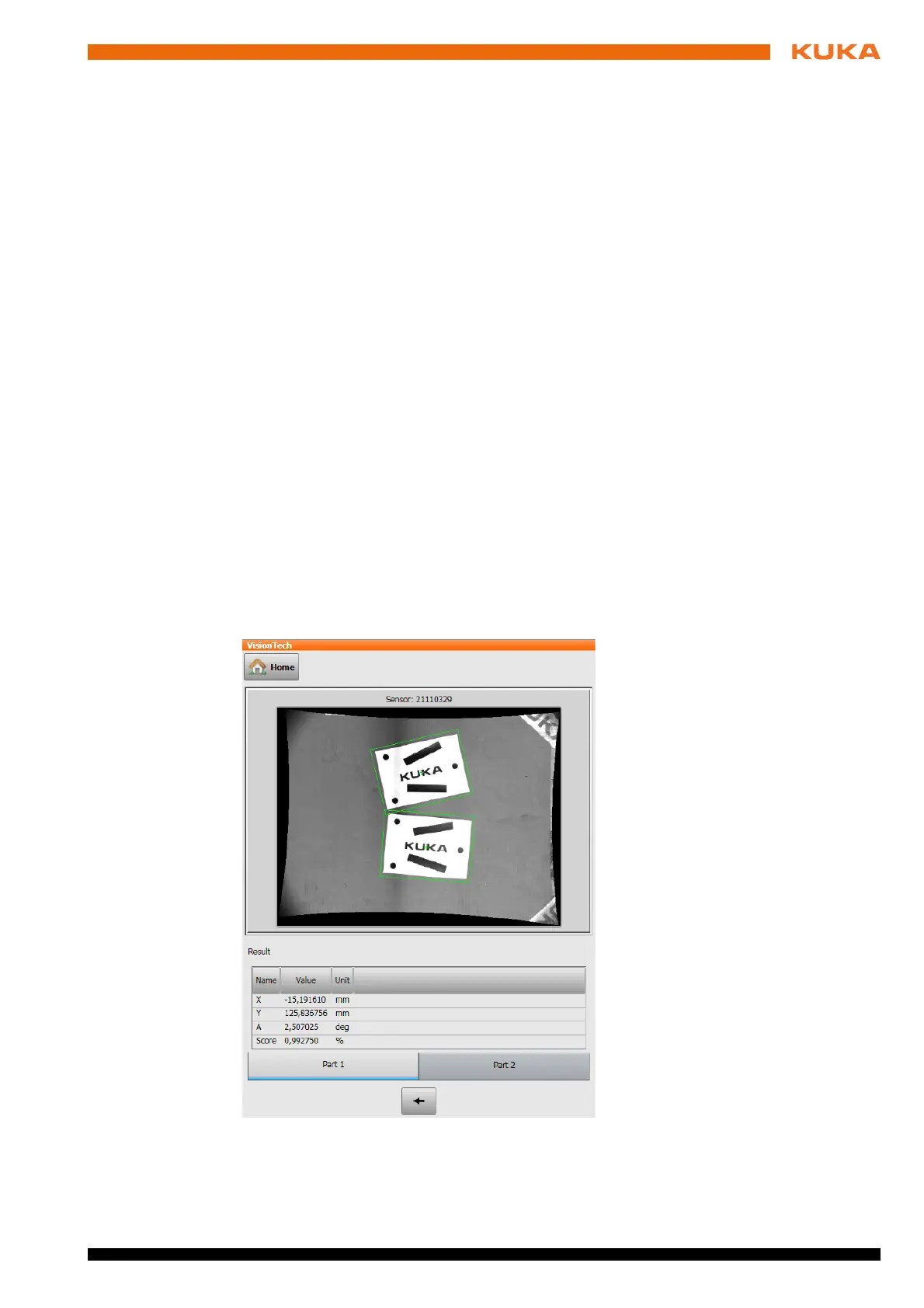
Description Once the test has been performed, a result window with images and a table is
displayed.
Areas detected by the cameras are indicated in green in the images. Areas
that have not been detected are marked in red. The differences between the
reference position used for model generation and the calculated position are
displayed in the table. If multiple components have been detected, the tables
are displayed on tabs.
The value of Score is between 0.0 and 1.0. The better the match between the
trained pattern and the pattern in the current search image, the higher the val-
ue of Score.
Fig. 10-5: Result of a 2D task test (example)
 Loading...
Loading...


