274 Rockwell Automation Publication 2080-UM002L-EN-E - November 2021
Appendix F PID Function Blocks
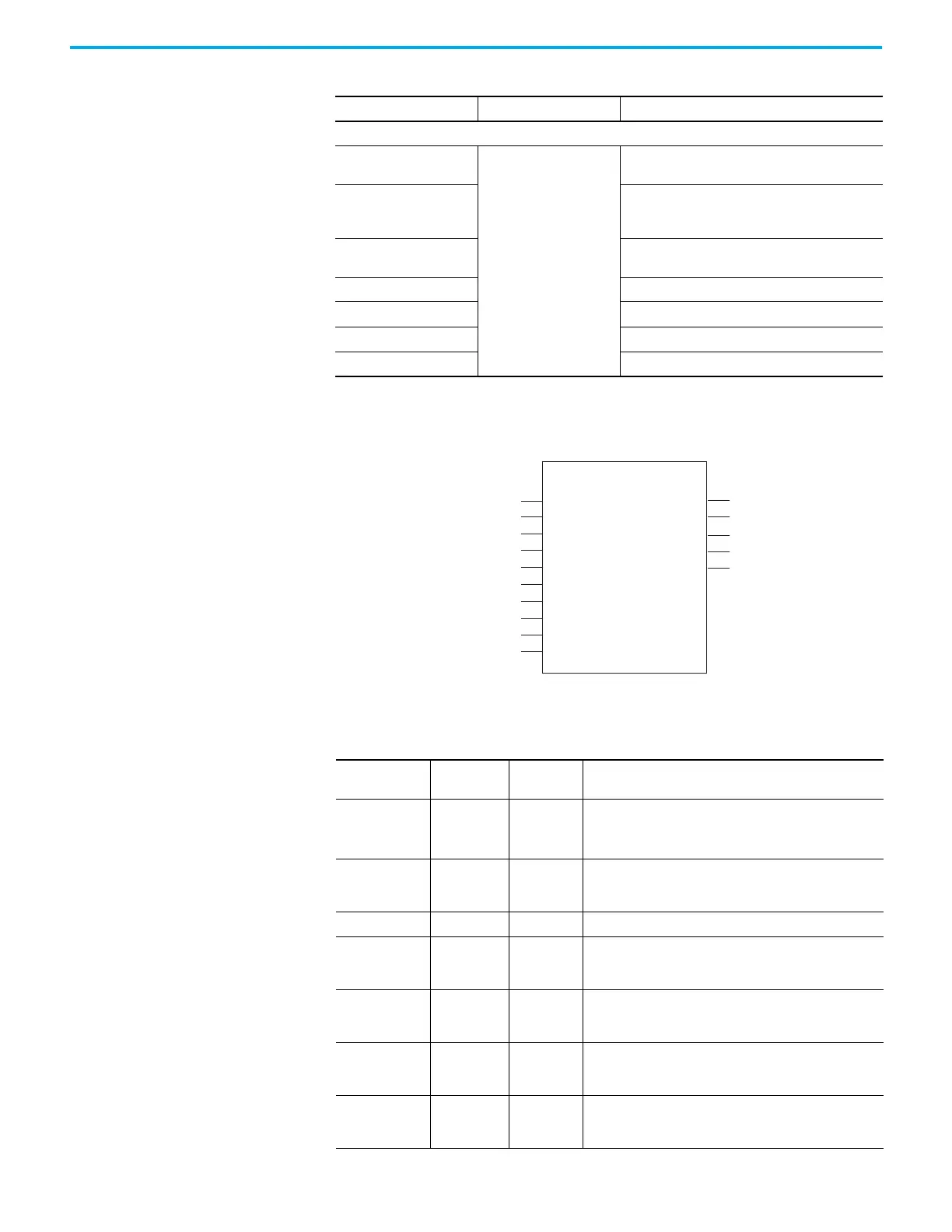
PID Function Block This function block diagram shows the arguments in the PID function block.
The following table explains the arguments used in this function block.
IPIDCONTROLLER-specific parameters
Auto
–
TRUE = Normal operation of PID.
FALSE = Output tracks Feedback.
Feedback
Feedback of the control being applied to the process.
Usually it’s the PID’s CV after any limits or manual
control has been applied.
AutoTune
TRUE = Autotune.
FALSE = No Autotune.
ATParameters Autotune parameters
ATWarning Autotune warning
OutGains Gains from Autotune
Initialize Used for AutoTune
Table 57 - Comparison Between IPIDCONTROLLER and PID (Continued)
IPIDCONTROLLER PID Description
Table 58 - PID Arguments
Parameter
Parameter
Type
Data Type Description
Enable Input BOOL
Enable instruction.
TRUE = Start execution with current input parameters.
FALSE = CV equals zero.
PV Input REAL
Process Value. This value is typically read from an analog input
module.
The SI unit must be the same as Setpoint.
SP Input REAL The set point value for the process.
AutoManual Input BOOL
Auto or manual mode selection:
TRUE = Normal operation of PID.
FALSE = Manual operation using CVManual.
CVManual Input REAL
Control value input defined for manual mode operation. The
valid range for CVManual is:
CVMin < CVManual < CVMax
CVMin Input REAL
Control value minimum limit.
If CV < CVMin, then CV = CVMin.
If CVMin > CVMax, and error occurs.
CVMax Input REAL
Control value maximum limit.
If CV > CVMax, then CV = CVMax.
If CVMax < CVMin, an error occurs.
PID
PV
Active
CV
AbsoluteErrorSP
AutoManual
CVManual
CVMax
CVMin
Gains
Control
Error
Error ID
Llnit
Enable

 Loading...
Loading...






