1) The number of pulses per rotation and the ratio of electronic gears can limit the amount of
instructions required for the servo motor to rotate one turn. They are complementary, but the priority of
the number of pulses per turn is higher than the ratio of electronic gears. Only when the number of
pulses per turn is set to zero, the ratio of electronic gears will take effect. This is what users need to pay
attention to. In special cases, if the number of pulses per revolution is decimal, the use of electronic
gear ratio should be considered.
2) When P0-13 and P0-14 exceed the set range, please divide the denominator into integers within the
set range. The approximate score does not affect the use without changing the ratio. If the parameters
are still beyond the range of setting after approximation, please use P0-92~P0-95.
3) The resolution of DS5 series servo motor encoder is 131072 (17 bits) and 8388608 (23 bits).
According to the use of motor.
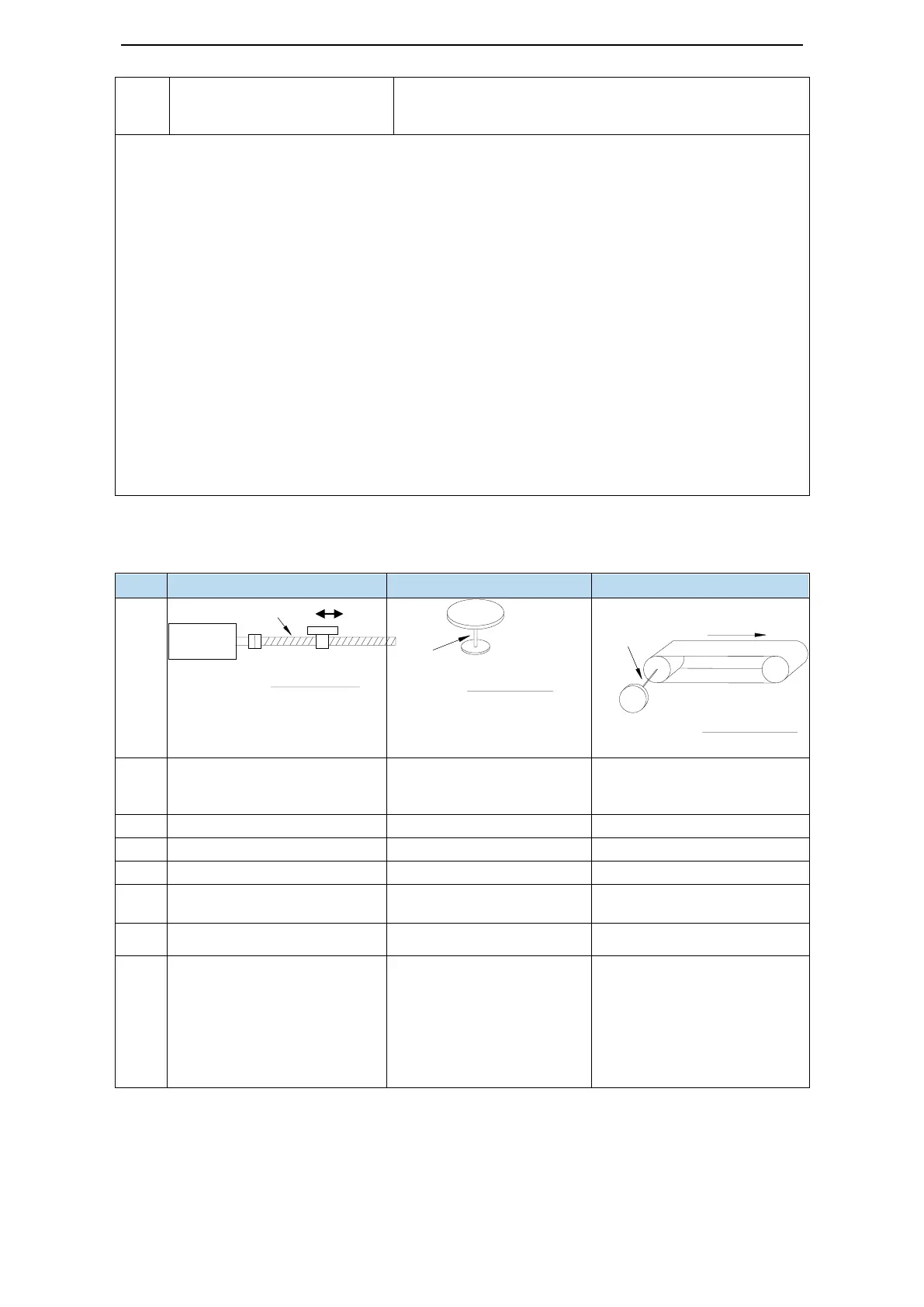
4) The instruction unit does not represent the processing accuracy. The precision of servo positioning
can be improved by refining the instruction unit on the basis of mechanical accuracy. For example, in
the application of the screw, the accuracy of the machine can reach 0.01mm, so the 0.01mm instruction
unit equivalent is more accurate than the 0.1mm instruction unit equivalent.
2. Example of setting the electronic gear ratio
 Loading...
Loading...


