65
(2) Running example
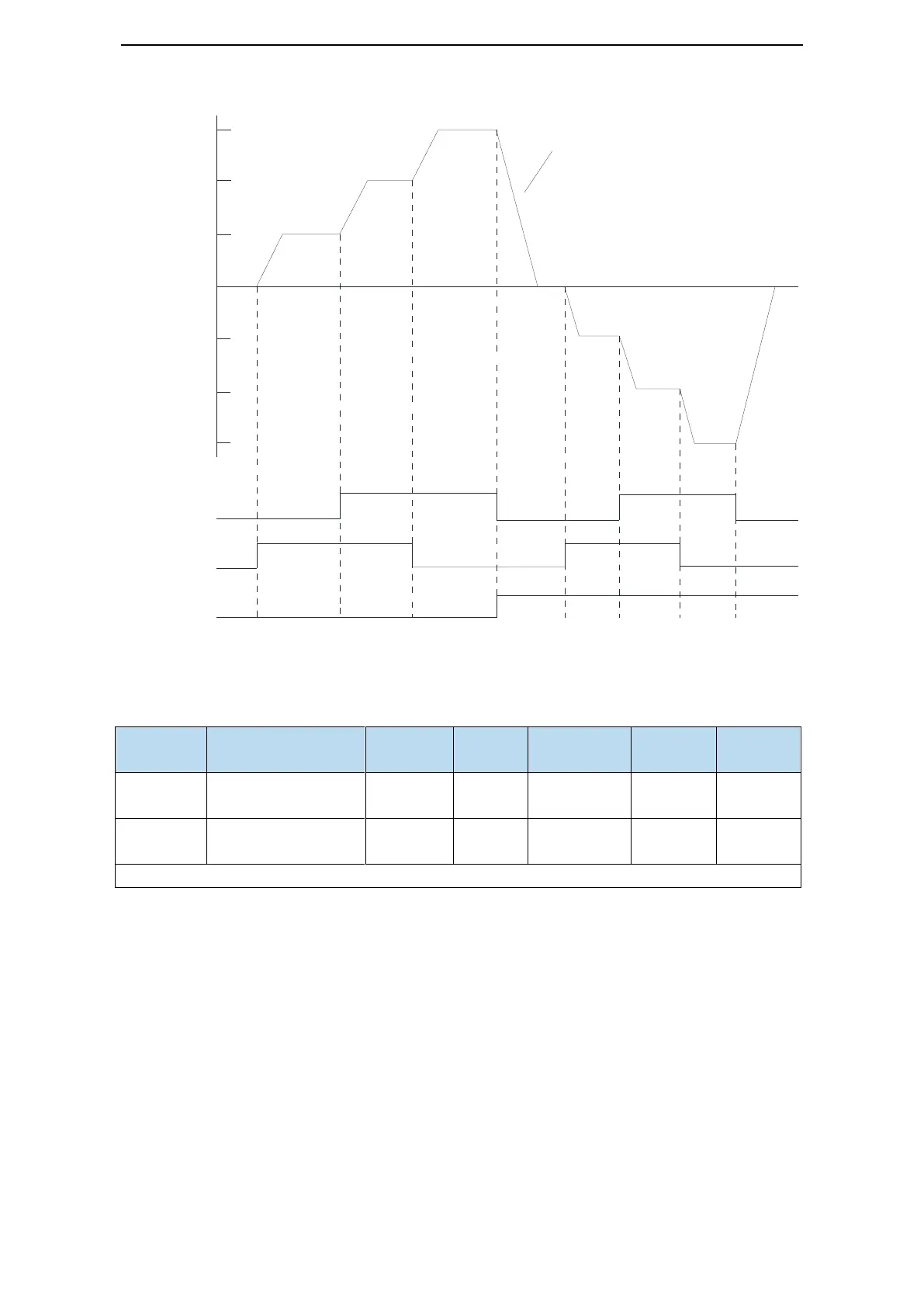
5.6.5 Speed command limit
Forward max speed
command limit
Reverse max speed
command limit
Note: P3-14 and P3-15 are effective in all the modes.
5.6.6 Zero clamp(/ZCLAMP)
(1) Function
This function is used when host controller uses speed command input and the servo system isn’t
configured the position loop. In other words, the function will be used when the motor must stop and
enter lock state even the V-REF input voltage is not zero.
When set ON the zero clamp function, it will configure the position loop inside the servo, the motor
will do zero clamp within ±1 pulse at this position. The motor will return to zero clamp position even it
is run by external force.
The present speed must be smaller than zero clamp speed when using zero clamp function, it can clamp
the motor shaft from moving. The motor will switch from speed mode to position mode when starting
the zero clamp function. At this time, rotate the motor shaft, it will return to the original position. It will
not return to original position in speed mode, because it has no position feedback.
Speed up down is decided by
 Loading...
Loading...


