6. Control Functions and Parameter Settings
6-45
B18-0
Over current limit
B18-1,2
Check next page
B18-3
Over current limit gain
B18-4
Current stabilisation gain
B18-5
Over current breakdown prevention gain
B18-6
Over current stall prevention time constant
The over current limit is a function that lowers the output frequency and suppresses the
current so that the motor current does not exceed this parameter setting value during starting
or constant running. The setting uses the motor rated current (B00-6) as 100%.
Normally, set the default value (150%).
(Note) Set a value larger than the motor no-load current.
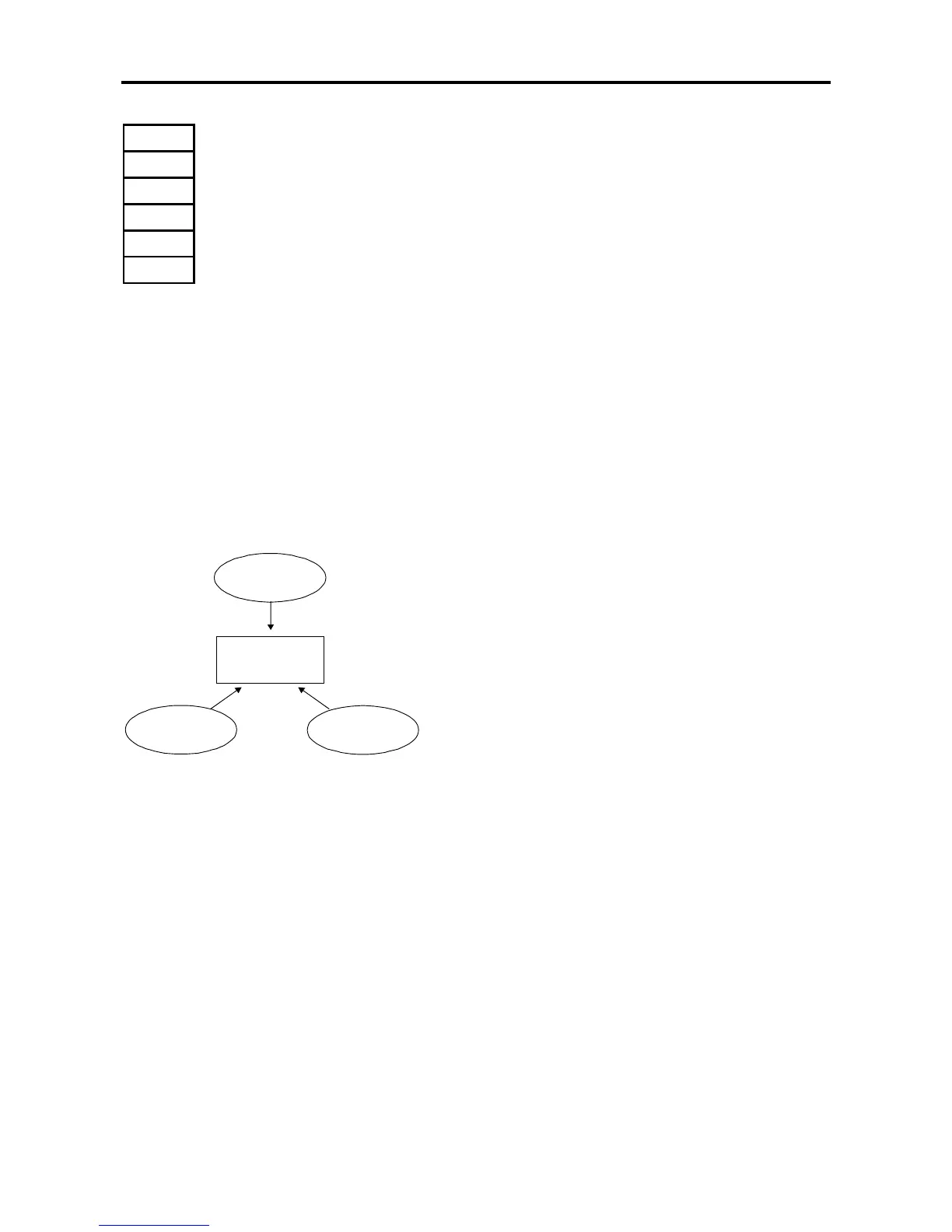
The overcurrent limit function is configured of the following three control blocks.
(1) Overcurrent vector limit function
This uses the overcurrent as a vector, and generates a
suppressing voltage vector instantly to suppress the
current. The response is adjusted with the overcurrent limit
gain (B18-3).
Normally, set the default value (0.25).
If the setting value is increased, the response will become
faster, but the operation may become unstable.
(2) Current stabilisation control
This suppresses the sudden changes during overcurrent
suppression by controlling the output frequency. The
response is adjusted with the over current stabilisation gain
(B18-4).
Normally, set the default value (0.25).
If the setting value is increased, the torque vibration will be
reduced, but the operation may become unstable.
(3) Frequency compensation control
This feeds back the voltage suppressed with the
overcurrent vector limit function to the frequency command
and prevents breakdown. The response is adjusted with
the over current stall prevention gain (B18-5) and over
current stall prevention time constant (B18-6).
Normally, set the default value (B18-5 = 1.0, B18-6 = 100).
If the gain setting value (B18-5) is increased or the time
constant value (B18-6) is decreased, the response will
become faster, but the operation may become unstable.
(Note) The overcurrent limit function is valid at all times regardless of whether automatic
tuning has been executed.
Overcurrent Vector
limit function
Overcurrent limit
function
Frequency
compensation
control
Current
stabilization
control

 Loading...
Loading...



