142
US. 22
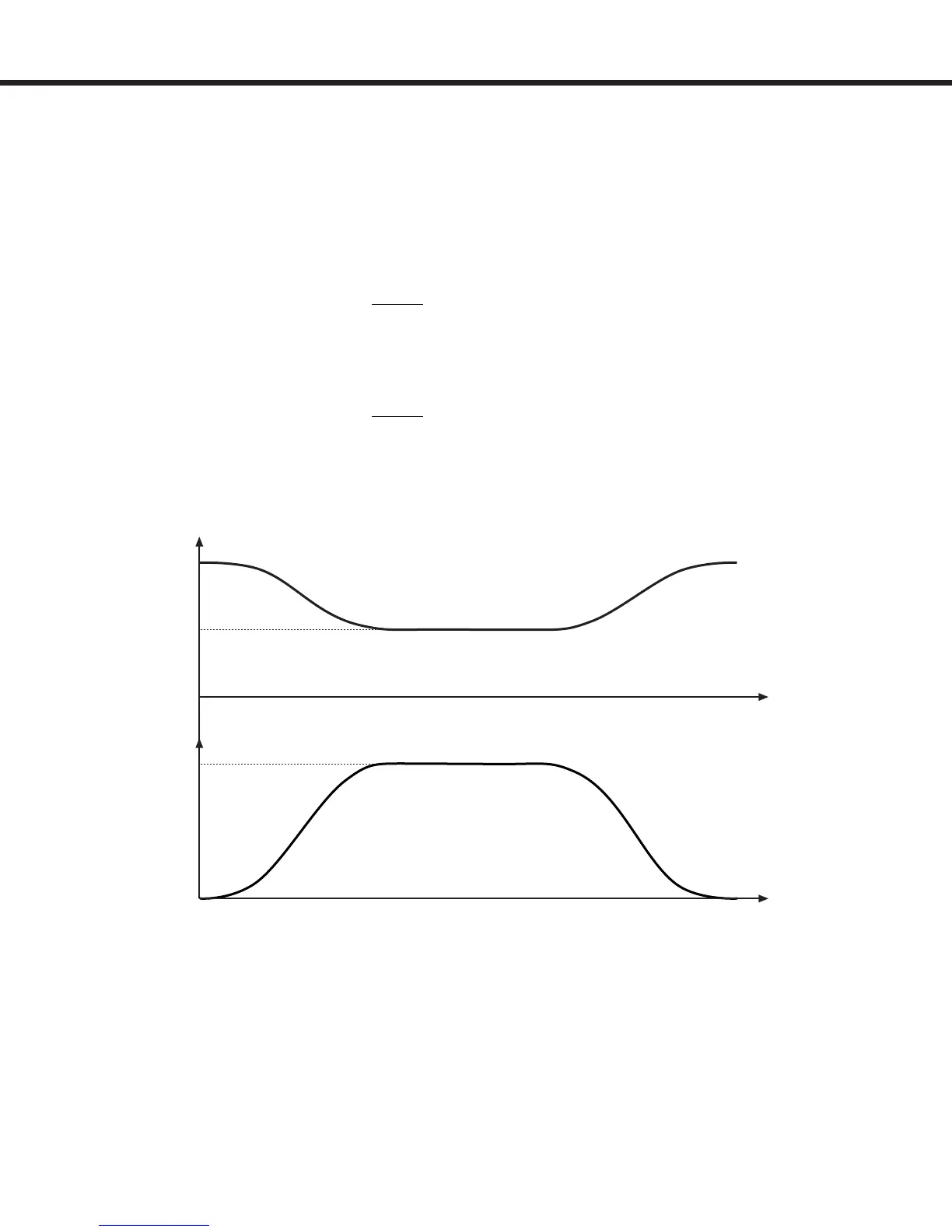
Speed
dependent KP
gain
These parameters allow the KP gain to be scaled dependent on the command speed
of the elevator. In some cases it is bene cial to reduce the gain at high speed to
minimize system response to hoistway vibrations or disturbances. Parameter US.22
turns the variable gain function on or off and parameter US.23 adjusts the value to
which the gain is reduced.
US.22
Unit: -
Value range: off, on
Default setting: off
US.23
Unit: 1
Value range: 0..32000
Default setting: 1000
US. 23
Min KP gain at
high speed
time
Speed
KP value
LF.31
US.23
time
High
Speed
LF.42
US. 24
KD speed gain
This acts as a derivative gain for the speed control. Generally the use of the derivative
term is not necessary. However, there are some applications, where it could be
useful. An example of which would be if for some reason it was necessary to keep
the KP and KI gain values very low to prevent oscillation. In this case the KD gain
could be used to maintain stability.
Unit: -
Value range: 0...32000
Default setting: 0
Recommended adjustment: 500 - 1500
Advanced Parameters
 Loading...
Loading...

















