Safe standstill
Functional test
Automatic cyclic monitoring of ”safe standstill” with PLC
11
11.4
11.4.1
11.4-2
EDSVF9333V EN 3.0-06/2005
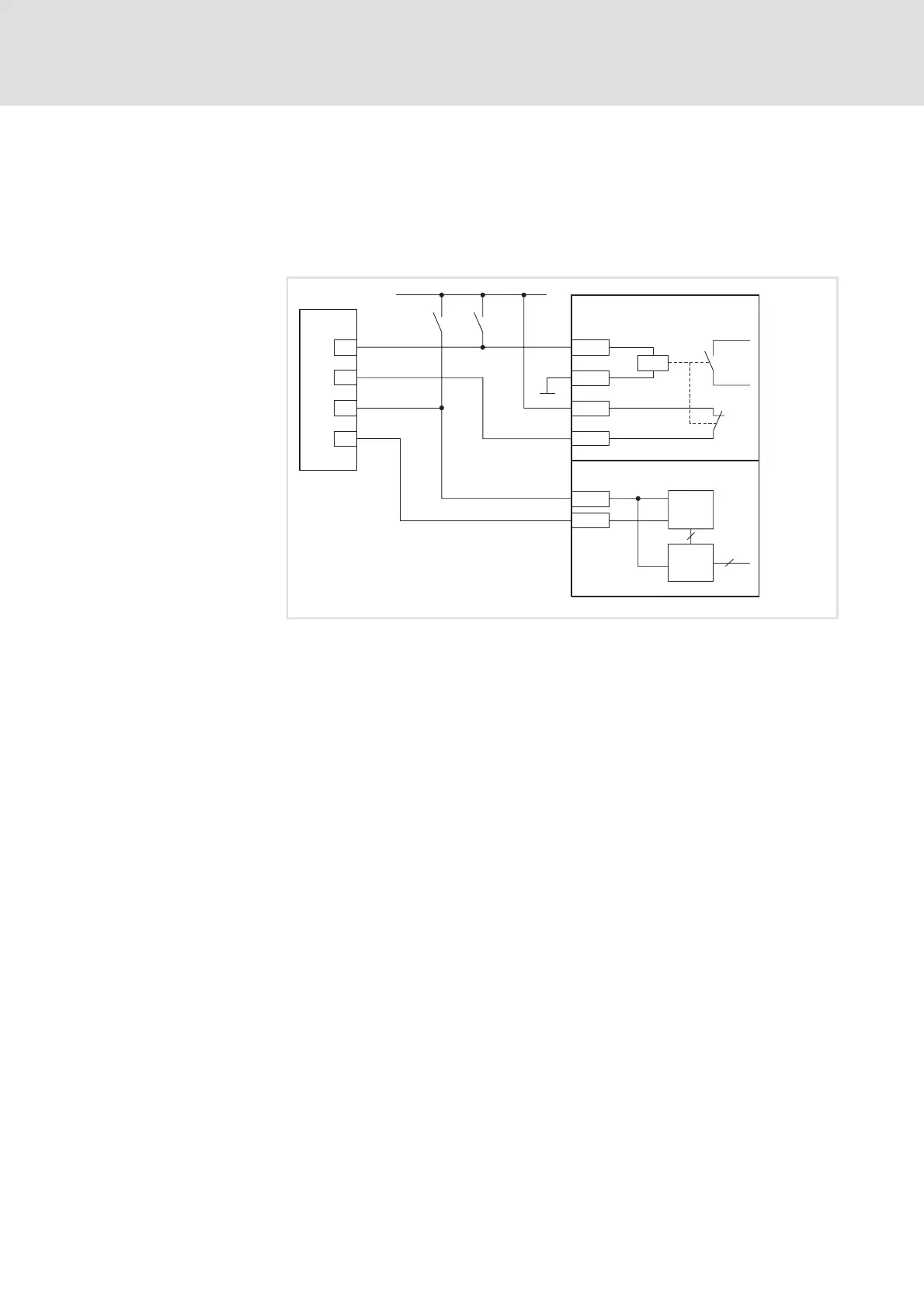
11.4.1 Automatic cyclic monitoring of ”safe standstill” with PLC
An alternative to the manual monitoring of the disconnecting paths is an
automatic monitoring with a PLC.
For this monitoring, a digital output of the controller (DIGOUT) is used as
example.
K
SR
µC
PWM
PWM
RFR
DC 24 V
Z1
9300
S1
S2
IN 1
IN 2
IN 3
IN 4
X11/34
X11/33
X11/K32
X11/K31
X5/28
DIGOUT
9300vec104
Fig. 11.4-1 External wiring of the controller with PLC and automatic cyclic monitoring
S1, S2 Both disconnecting paths can be disconnected separately
DIGOUT If I
motor
= 0, then DIGOUT = HIGH
If I
motor
≠ 0, then DIGOUT = LOW
Z1 Programmable l ogic controller (PLC)
Ctrl.
enable
Controller enable
The following conditions must be fulfilled:
ƒ The PLC must be programmed so that the total system can be
immediately led into a safe state if the plausibility check results in an
impermissible state.
ƒ The output DIGOUT must be parameterised so that it can give
information about the output current I
motor
of the drive. ( 11.4-3)
–IfI
motor
=0,thenDIGOUT=HIGH
–IfI
motor
≠ 0, then DIGOUT = LOW
 Loading...
Loading...