Basic operator panel (BOP)
6.5 Auxiliary functions
SINAMICS V90, SIMOTICS S-1FL6
Operating Instructions, 04/2019, A5E36037884-007
207
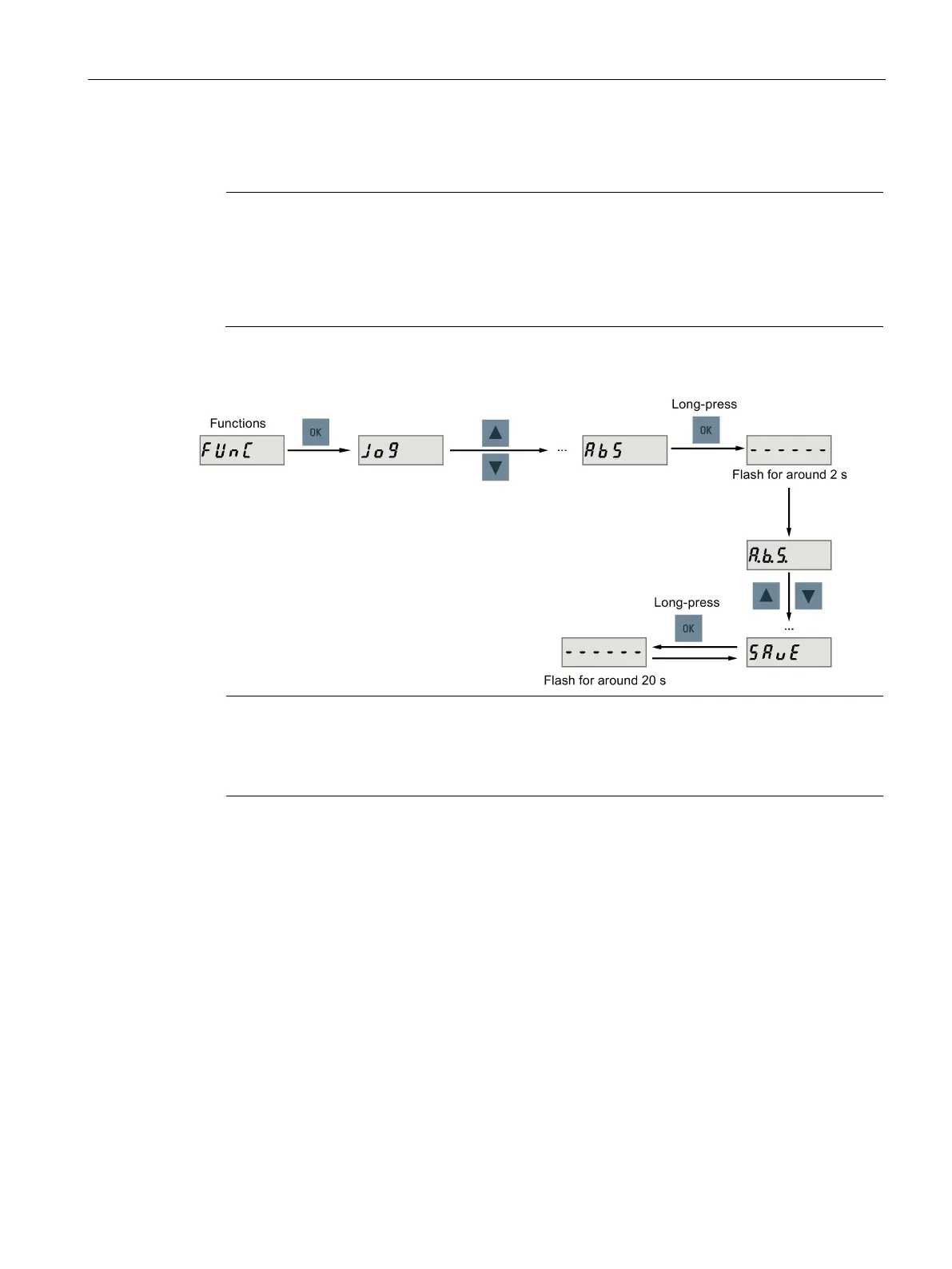
Adjusting an absolute encoder
Note
Motor type
This function is only
available when you are using a servo motor with the absolute encoder.
Stop the servo motor
You must stop the servo motor before adjusting the absolute encoder.
With the BOP function menu "
", you can set the current position of an absolute encoder
to the zero position. To do this, proceed as follows.
Note
Save parameter
The position value is set
in parameter p2525. You
save the parameters after setting the
zero position.

 Loading...
Loading...










