Control functions
7.2 General functions
SINAMICS V90, SIMOTICS S-1FL6
Operating Instructions, 04/2019, A5E36037884-007
217
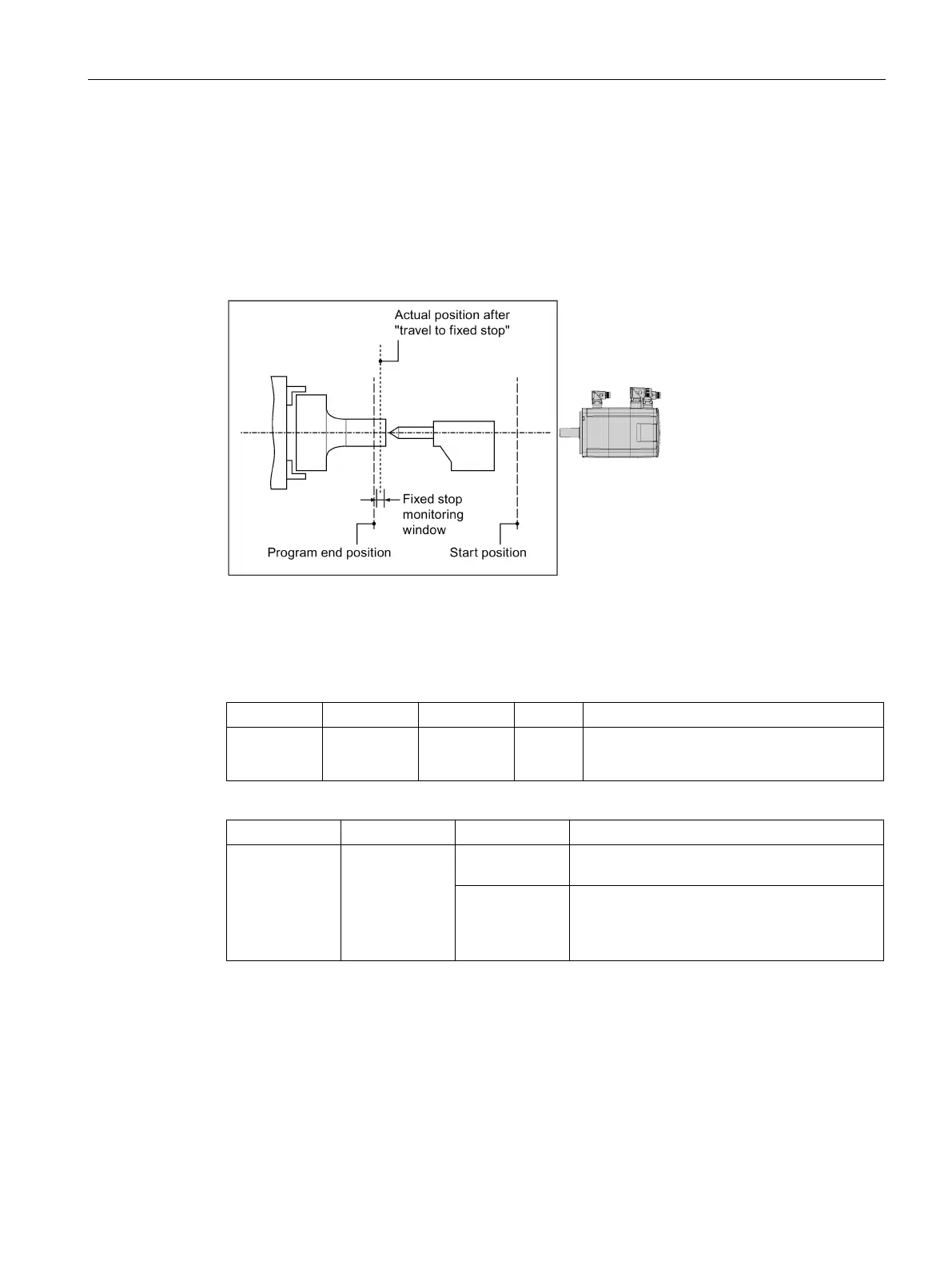
The function can be used to move the motor to a fixed stop at a specified torque without a
fault being signaled. The specified torque is built up and remains applied after the motor
reaches the fixed stop.
The desired torque derating is brought about by scaling the upper torque limit and the lower
torque limit.
Function behavior in PTI/Fast PTI control mode
You can configure the function of travelling to fixed stop by setting the following parameter.
When the fixed stop is reached, the drive sets the digital output torque limit reached (TLR).
p29045 0 to 1 0 -
• 0: Travel to fixed stop is inactive
• 1: Travel to fixed stop is active.
DO TLR 0 The generated torque has not reached any
1 The generated torque has nearly (internal hys-
teresis) reached the value of the positive torque
limit, negative torque limit or analog torque
limit.

 Loading...
Loading...










