146 Program features
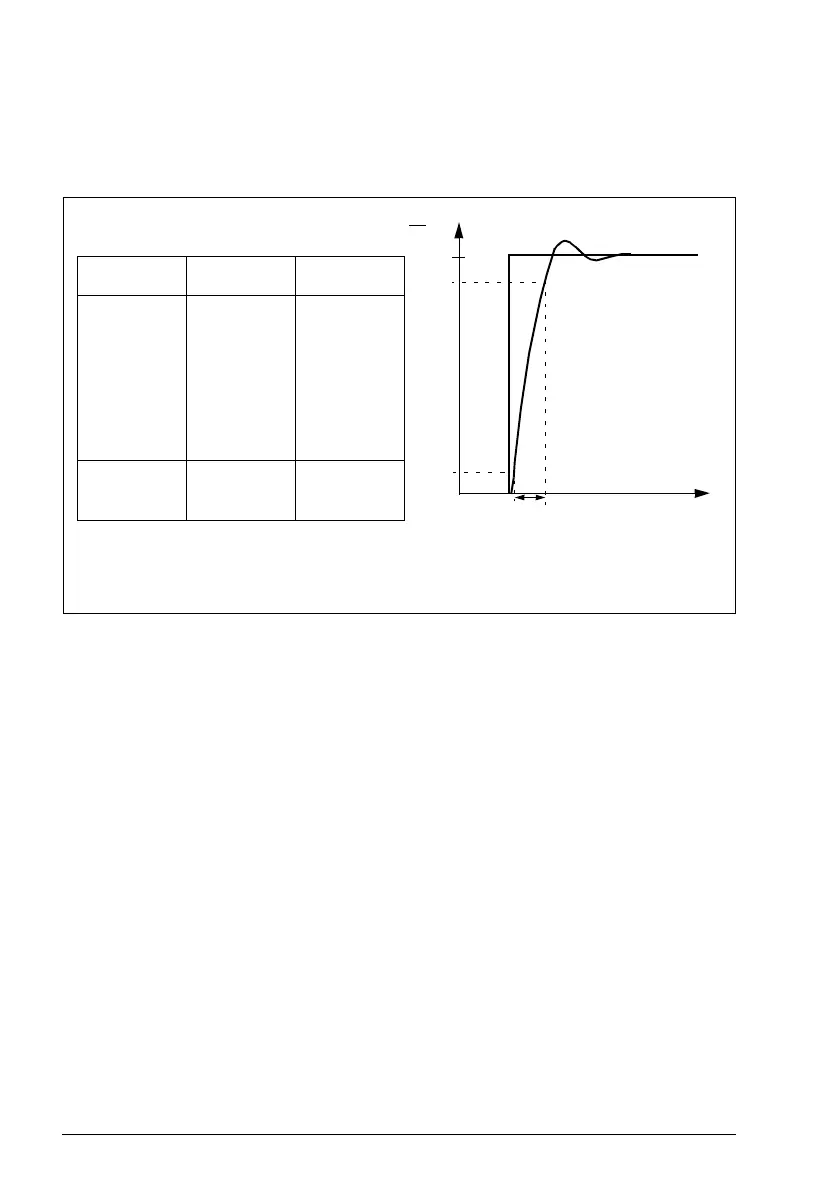
Torque control performance figures
The drive can perform precise torque control without any speed feedback from the
motor shaft. The table below shows typical performance figures for torque control.
Scalar control
It is possible to select scalar control as the motor control method instead of vector
control. In the scalar control mode, the drive is controlled with a frequency reference.
It is recommended to activate the scalar control mode in the following special
applications:
• In multimotor drives: 1) if the load is not equally shared between the motors,
2) if the motors are of different sizes, or 3) if the motors are going to be changed
after the motor identification.
• If the nominal motor current is less than 20% of the nominal output current of the
drive.
• When the drive is used for test purposes with no motor connected.
The scalar control mode is not recommended for permanent magnet synchronous
motors.
In the scalar control mode, some standard features are not available.
Settings
Parameter 9904 MOTOR CTRL MODE
t (s)
T
N
= rated motor torque
T
ref
= torque reference
T
act
= actual torque
Torque
control
No pulse
encoder
With pulse
encoder
Non-linearity ± 5% with
nominal
torque
(± 20% at the
most
demanding
operating
point)
± 5% with
nominal
torque
Torque step
rise time
< 10 ms with
nominal
torque
< 10 ms with
nominal
torque
100
< 5 ms
90
10
T
ref
T
act
T
T
N
(%)

 Loading...
Loading...











