116 Application macros
Torque control macro
This macro provides parameter settings for applications that require torque control of
the motor. Control can also be switched to speed control using a digital input. To
enable the macro, set the value of parameter 9902 APPLIC MACRO to 8 (TORQUE
CTRL).
For the parameter default values, see section Default values with different macros on
page 180. If you use other than the default connections presented below, see section
I/O terminals on page 53.
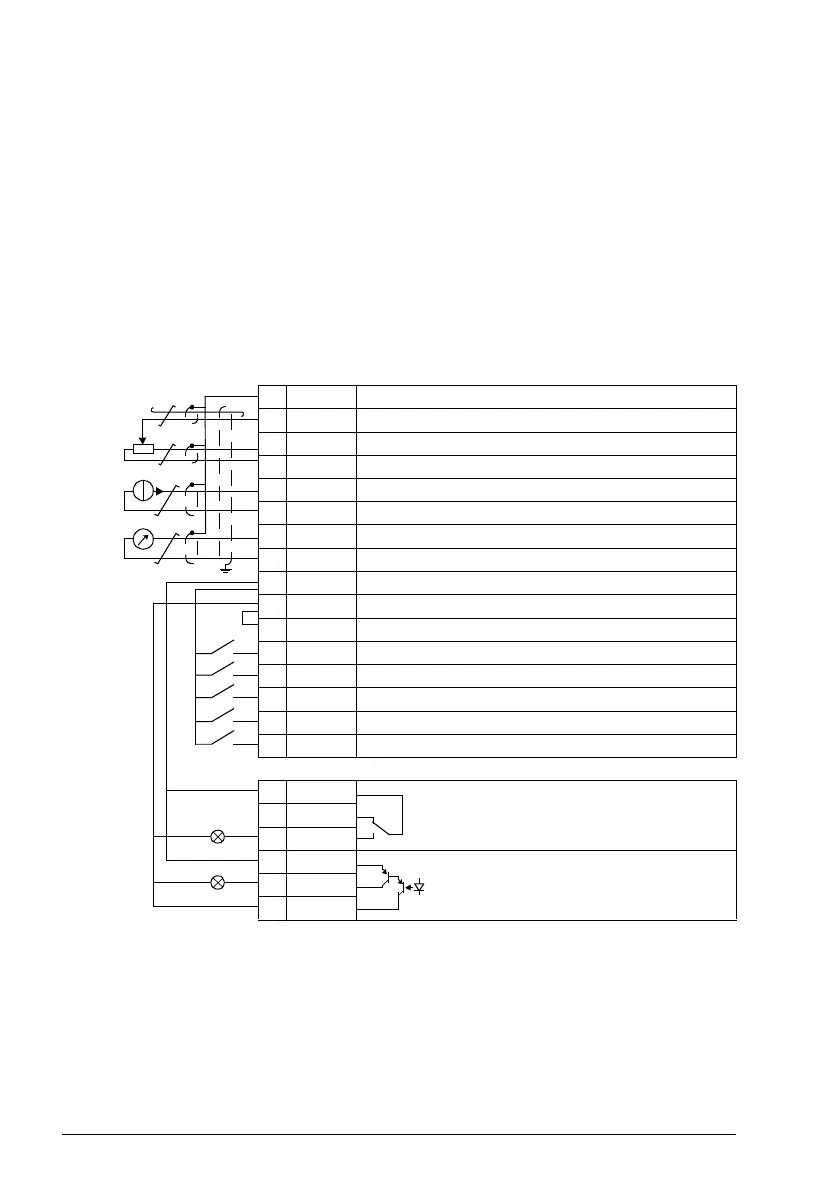
Default I/O connections
X1A
1 SCR Signal cable shield (screen)
2AI1 Motor speed reference (Speed): 0…10 V
3 GND Analog input circuit common
4 +10V Reference voltage: +10 V DC, max. 10 mA
5AI2 Motor torque reference (Torque): 4…20 mA
4)
6 GND Analog input circuit common
7AO Motor speed value: 0…20 mA
8 GND Analog output circuit common
9 +24V Auxiliary voltage output: +24 V DC, max. 200 mA
10 GND Auxiliary voltage output common
11 DCOM Digital input common
12 DI1 Stop (0) / Start (1) (Speed)
13 DI2 Forward (0) / Reverse (1)
1)
14 DI3 Speed (0) / Torque (1) control selection
15 DI4 Constant speed 1: parameter 1202
16 DI5 Acceleration and deceleration selection
2)
X1B
17 ROCOM Relay output 1
No fault [Fault (-1)]
18 RONC
19 RONO
20 DOSRC Digital output, max. 100 mA
No fault [Fault (-1)]
21 DOOUT
22 DOGND
max. 500 ohm
1…10 kohm
3)
1)
Speed control: Changes rotation direction.
Torque control: Changes torque direction.
2)
0 = ramp times according to parameters 2202 and
2203.
1 = ramp times according to parameters 2205 and
2206.
3)
360 degree grounding under a clamp.
4)
The signal source is powered externally. See the
manufacturer’s instructions. To use sensors
supplied by the drive aux. voltage output, see page
55.
Tightening torque: 0.4 N·m / 3.5 lbf·in.
Safe torque off connections (X1C:STO; not shown in
the diagram) are jumpered by default.

 Loading...
Loading...











