234 Actual signals and parameters
2203 DECELER
TIME 1
Defines the deceleration time 1, ie, the time required for the
speed to change from the value defined by parameter 2008
MAXIMUM FREQ (in scalar control) / 2002 MAXIMUM
SPEED (in vector control) to zero. The control mode is
selected by parameter 9904 MOTOR CTRL MODE.
• If the speed reference decreases slower than the set
deceleration rate, the motor speed will follow the
reference signal.
• If the reference changes faster than the set deceleration
rate, the motor speed will follow the deceleration rate.
• If the deceleration time is set too short, the drive will
automatically prolong the deceleration in order not to
exceed drive operating limits.
If a short deceleration time is needed for a high inertia
application, the drive should be equipped with a brake
resistor.
Actual deceleration time depends on parameter 2204
RAMP SHAPE 1 setting.
5.0 s
0.0…1800.0 s Time 1 = 0.1 s
2204 RAMP SHAPE
1
Selects the shape of the acceleration/deceleration ramp 1.
The function is deactivated during emergency stop and
jogging.
0.0 =
LINEAR
0.0 = LINEAR
0.1…1000.0 s
0.0: Linear ramp. Suitable for steady acceleration or
deceleration and for slow ramps.
0.1…1000.0 s: S-curve ramp. S-curve ramps are ideal for
conveyors carrying fragile loads, or other applications where
a smooth transition is required when changing from one
speed to another. The S-curve consists of symmetrical
curves at both ends of the ramp and a linear part in
between.
1 = 0.1 s
All parameters
No. Name/Value Description Def/FbEq
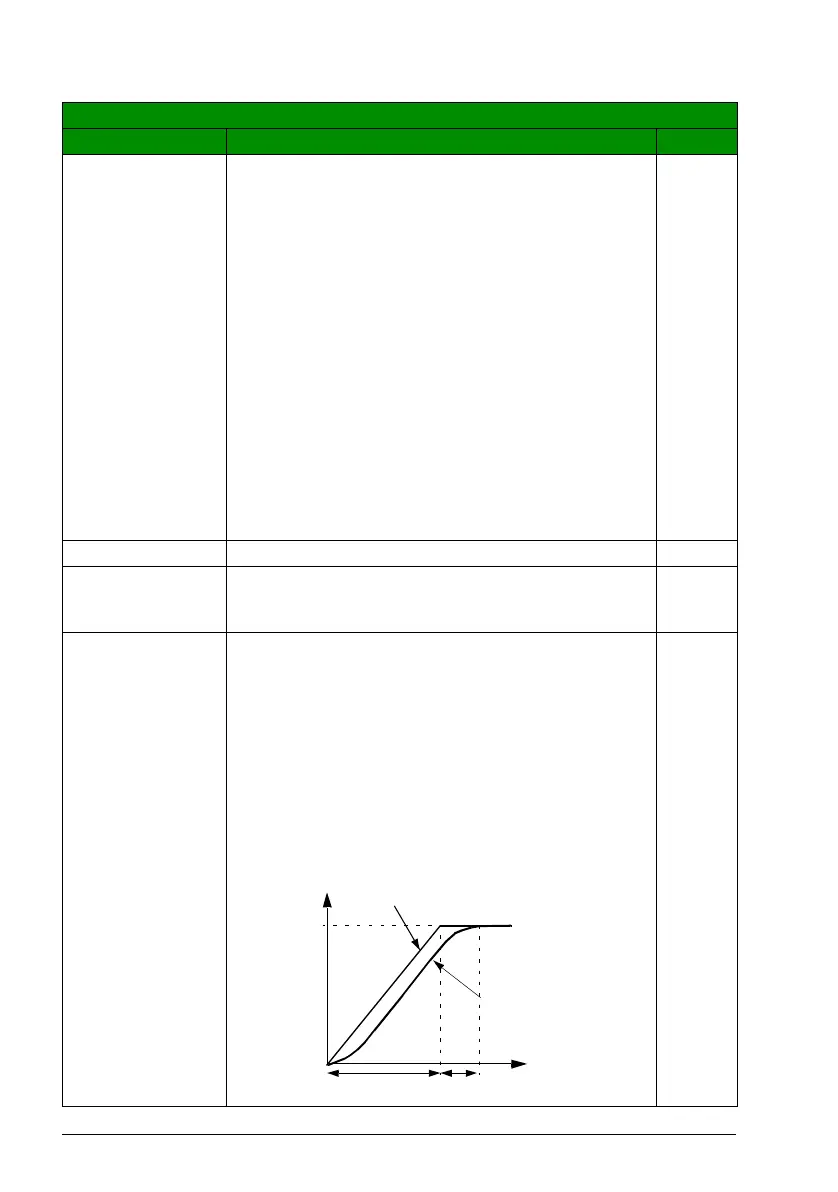
Linear ramp: Par. 2204 = 0 s
S-curve ramp:
Par. 2204 > 0 s
A rule of thumb:
A suitable relation between the ramp shape time and the
acceleration ramp time is 1/5.
t
Par. 2204Par. 2202
Max
Speed

 Loading...
Loading...











