Actual signals and parameters 273
3628 TIMED FUNC 3
SRC
See parameter 3626 TIMED FUNC 1 SRC.
See parameter 3626 TIMED FUNC 1 SRC.
3629 TIMED FUNC 4
SRC
See parameter 3626 TIMED FUNC 1 SRC.
See parameter 3626 TIMED FUNC 1 SRC.
40 PROCESS PID
SET 1
Process PID (PID1) control parameter set 1. See section
PID control on page 151.
4001 GAIN Defines the gain for the process PID controller. High gain
may cause speed oscillation.
1.0
0.1…100.0 Gain. When value is set to 0.1, the PID controller output
changes one-tenth as much as the error value. When value
is set to 100, the PID controller output changes one hundred
times as much as the error value.
1 = 0.1
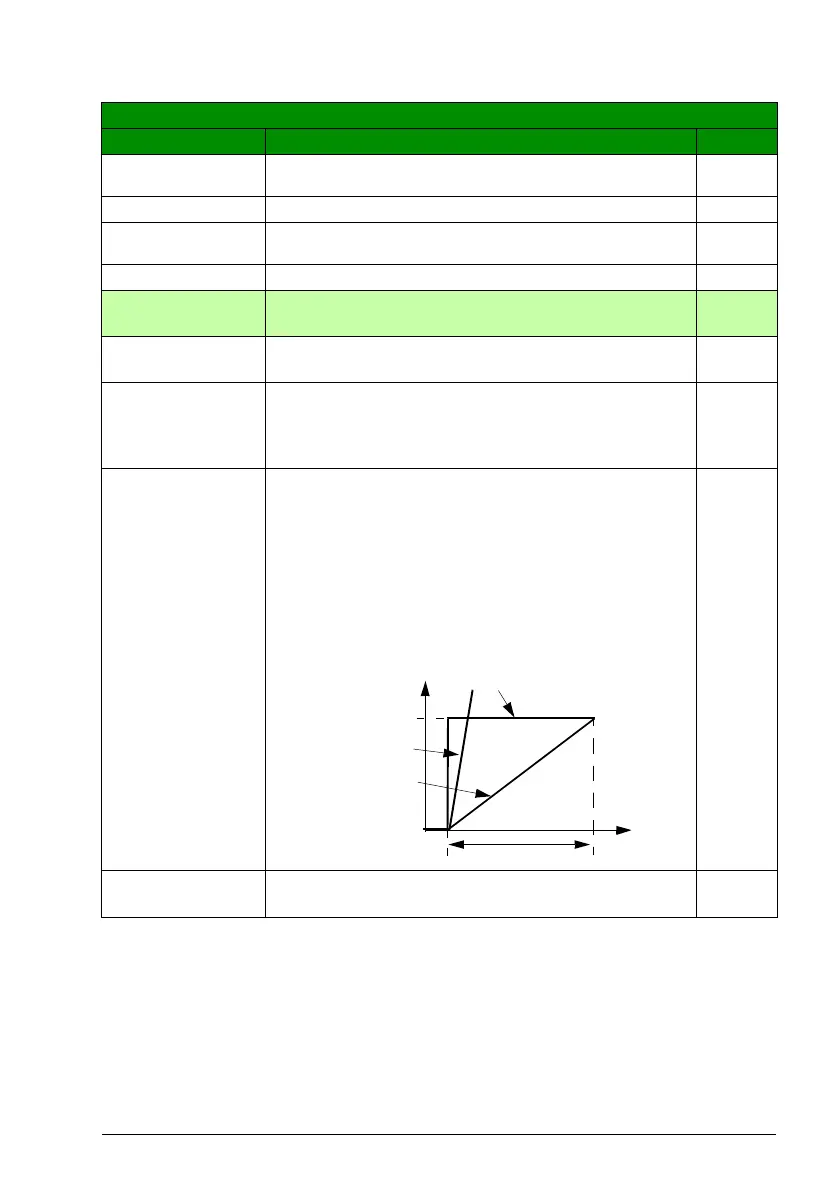
4002 INTEGRATION
TIME
Defines the integration time for the process PID1 controller.
The integration time defines the rate at which the controller
output changes when the error value is constant. The
shorter the integration time, the faster the continuous error
value is corrected. Too short an integration time makes the
control unstable.
10.0 s
0.0 = NOT SEL
0.1…3600.0 s
Integration time. If parameter value is set to zero, integration
(I-part of the PID controller) is disabled.
1 = 0.1 s
All parameters
No. Name/Value Description Def/FbEq
t
A = Error
B = Error value step
C = Controller output with gain = 1
D = Controller output with gain = 10
D (4001 = 10)
C (4001 = 1)
B
A
4002

 Loading...
Loading...











