274 Actual signals and parameters
4003 DERIVATION
TIME
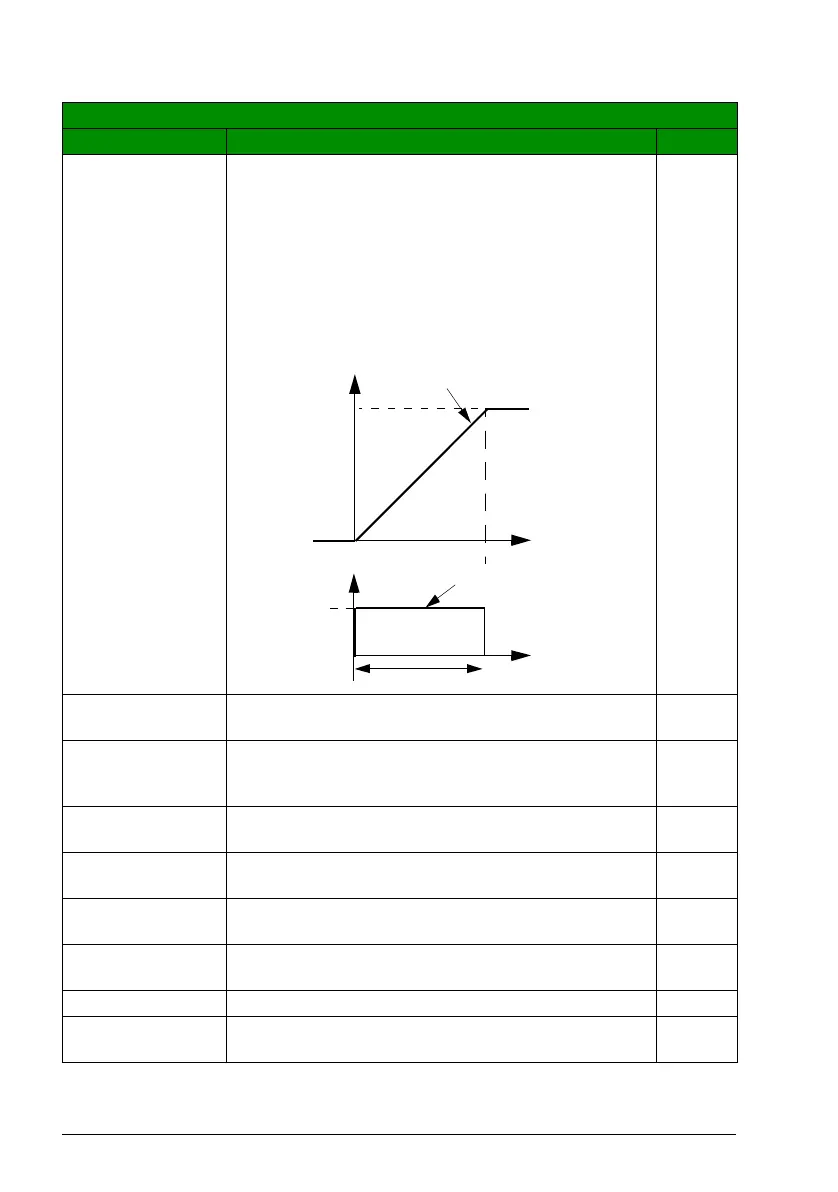
Defines the derivation time for the process PID controller.
Derivative action boosts the controller output if the error
value changes. The longer the derivation time, the more the
speed controller output is boosted during the change. If the
derivation time is set to zero, the controller works as a PI
controller, otherwise as a PID controller.
The derivation makes the control more responsive for
disturbances.
The derivative is filtered with a 1-pole filter. Filter time
constant is defined by parameter 4004 PID DERIV FILTER.
0.0 s
0.0…10.0 s Derivation time. If parameter value is set to zero, the
derivative part of the PID controller is disabled.
1 = 0.1 s
4004 PID DERIV
FILTER
Defines the filter time constant for the derivative part of the
process PID controller. Increasing the filter time smooths
the derivative and reduces noise.
1.0 s
0.0…10.0 s Filter time constant. If parameter value is set to zero, the
derivative filter is disabled.
1 = 0.1 s
4005 ERROR
VALUE INV
Selects the relationship between the feedback signal and
drive speed.
NO
NO Normal: A decrease in feedback signal increases drive
speed. Error = Reference - Feedback
0
YES Inverted: A decrease in feedback signal decreases drive
speed. Error = Feedback - Reference
1
4006 UNITS Selects the unit for PID controller actual values. %
0…127 See parameter 3405 OUTPUT1 UNIT selections in the
given range.
All parameters
No. Name/Value Description Def/FbEq
t
t
100%
0%
Error Process error value
D-part of controller outputPID output
4001
Gain
4003

 Loading...
Loading...











