124 Safety functions
SSE with speed limit activated SBC
In these examples, the SBC and drive STO functions are activated at a user-defined
speed limit.
With time monitoring
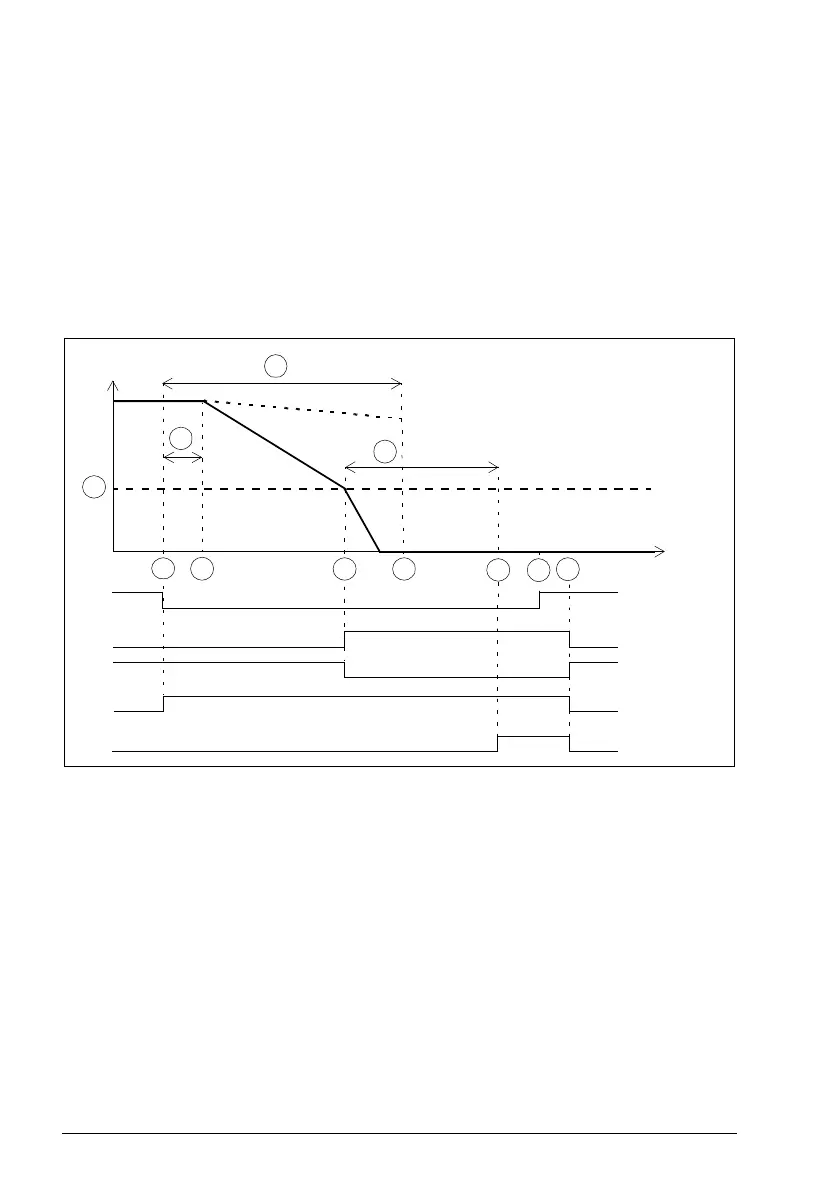
The operation of the SSE with speed limit activated SBC and time monitoring is
described in the time diagrams and tables below. For configuration, see section How
to configure SSE with speed limit activated SBC on page 356.
With a safe speed estimate
A SBC speed (parameter SBC.15): Speed limit below which the FSO activates SBC
(brake) and drive STO functions while ramping.
B SSE delay for STO (parameter SSE.15): Time after which the FSO activates the drive
STO function regardless of the motor speed.
C SBC time to zero (parameter SBC.13): Time from the SBC activation to the moment
when the safety function is completed and the SSE completed indication (parameter
SSE.22) goes on. The acknowledgment becomes allowed. You must set this to the
estimated time in which the motor brakes to a stop from the maximum speed.
D Response time (depends on system configuration, see page 532)
SSE.15
Drive STO state
& indication
SSE request
Motor speed
Time
SSE state &
indication
1
6
2
5
SBC output
3
A
D
SSE completed
indication
B
3b
- -> Safe torque off (STO)
C
SBC.13
4

 Loading...
Loading...








