Configuration 331
Configuring STO
To configure the STO function, set the FSO parameters listed below to appropriate
values using the Drive composer pro PC tool. See parameter groups STO on
page 409 and SBC on page 412.
For more information on the STO and SBC functions, see page 68.
Note: Always set the parameters related to the STO function to have the correct
monitoring limit hit and fault reaction behavior.
Note: If an encoder failure occurs, the FSO module activates the STO function. For
these situations, you have to configure the STO function also without an encoder (set
parameter STO.14 Time to zero speed with STO and modoff or SBC.13 SBC time to
zero speed to a suitable value according to your application).
How to configure STO
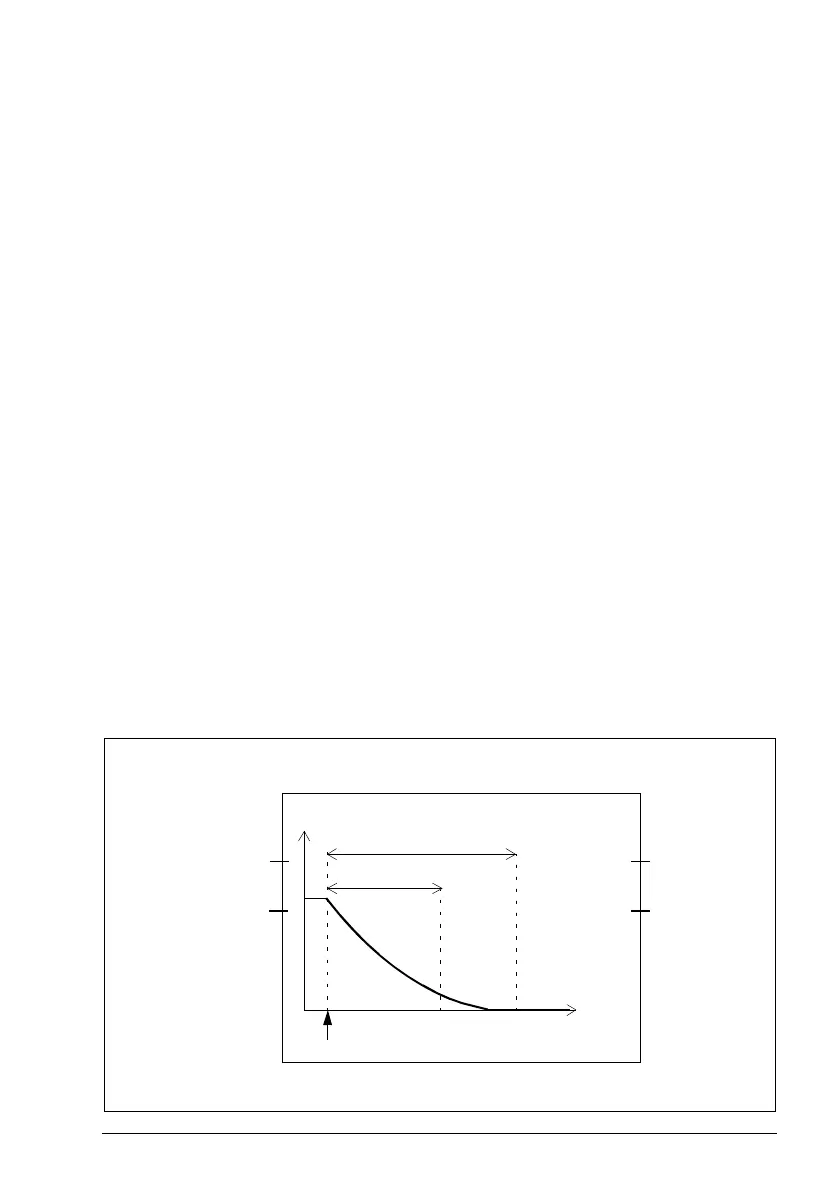
Example 1 (without an encoder): The figure below shows an example of a simple
STO function set-up when an encoder is not used:
• redundant emergency stop button connected to input
(STO.11 STO input A = DI X113:1 & X114:1)
• automatic acknowledgement (STO.02 STO acknowledgement = Automatic)
• estimated time in which the motor coasts to a stop from the maximum speed is
1500 ms (STO.14 Time to zero speed with STO and modoff = 1500 ms)
• the fly-start feature is in use, that is, you can restart the drive before the motor has
stopped (STO.13 Restart delay after STO = 1000 ms)
• no output connected
• no brake (SBC.11 STO SBC usage = None).
STO.11
= DI X113:1 & X114:1
STO.12
= None
STO.21
= None
SBC.11 = None
STO.13 = 1000 ms
STO.02 = Automatic
STO activated
Time
STO.22
= None
Speed
Inputs
Outputs
STO.14 = 1500 ms

 Loading...
Loading...








