6.1.2 Calibration methods
Overview
This section specifies the different types of calibration and the calibration methods
that are supplied by ABB.
Types of calibration
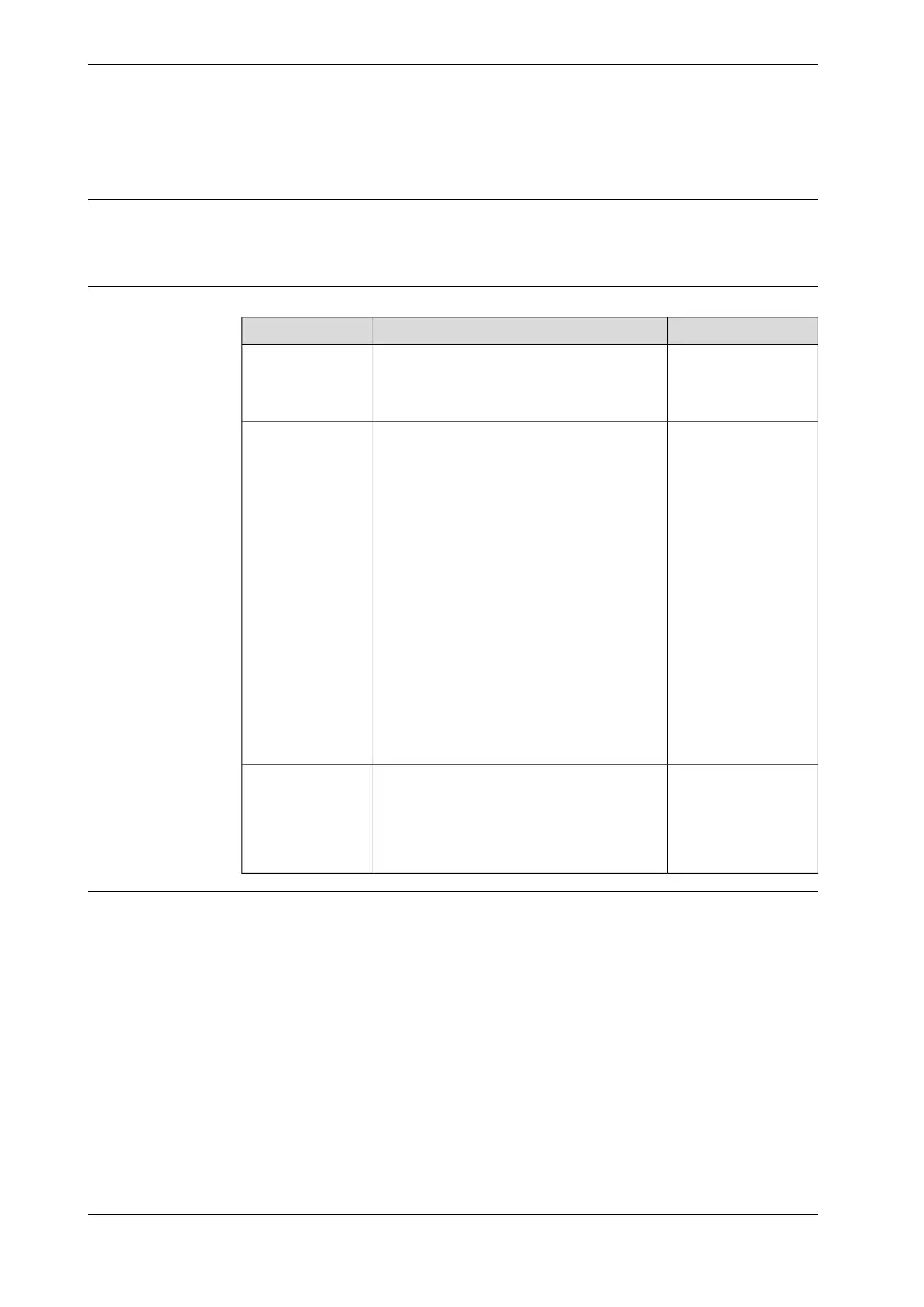
Calibration methodDescriptionType of calibration
Axis CalibrationThe calibrated robot is positioned at calibration
position.
Standard calibration
Standard calibration data is found on the SMB
(serial measurement board) or EIB in the robot.
CalibWareBased on standard calibration, and besides
positioning the robot at synchronization posi-
tion, the Absolute accuracy calibration also
compensates for:
• Mechanical tolerances in the robot
structure
• Deflection due to load
Absolute accuracy calibration focuses on pos-
itioning accuracy in the Cartesian coordinate
system for the robot.
Absolute accuracy
calibration (option-
al)
Absolute accuracy calibration data is found
on the SMB (serial measurement board) in the
robot.
A robot calibrated with Absolute accuracy has
the option information printed on its name
plate.
To regain 100% Absolute accuracy perform-
ance, the robot must be recalibrated for abso-
lute accuracy after repair or maintenance that
affects the mechanical structure.
Wrist OptimizationOptimization of TCP reorientation perform-
ance. The purpose is to improve reorientation
accuracy for continuous processes like weld-
ing and gluing.
Optimization
Wrist optimization will update standard calib-
ration data for axes 4 and 5.
Brief description of calibration methods
Axis Calibration method
Axis Calibration is a standard calibration method for calibration of IRB 1010. It is
the recommended method in order to achieve proper performance.
The following routines are available for the Axis Calibration method:
• Fine calibration
• Update revolution counters
• Reference calibration
The calibration equipment for Axis Calibration is delivered as a toolkit.
An introduction to the calibration method is given in this manual, see Calibrating
with Axis Calibration method on page 287.
Continues on next page
280 Product manual - IRB 1010
3HAC081964-001 Revision: B
© Copyright 2022 ABB. All rights reserved.
6 Calibration
6.1.2 Calibration methods
 Loading...
Loading...








