3.3.3 Manually releasing the brakes
Introduction to manually releasing the brakes
This section describes how to release the holding brakes for the axes motors.
Location of the brake release unit
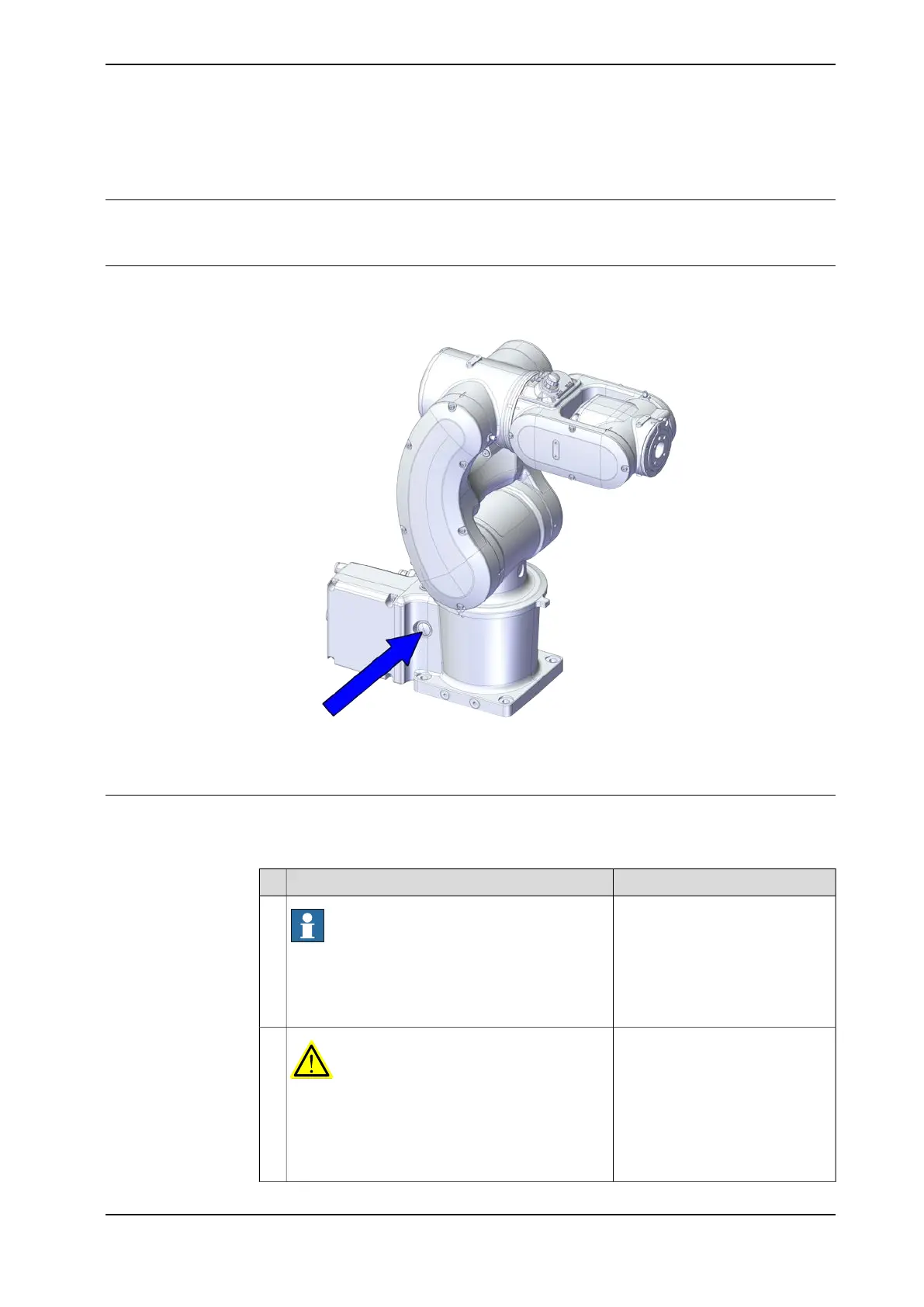
The brake release unit is located as shown in the figure.
xx2200000020
Releasing the brakes
This procedure describes how to release the holding brakes when the robot is
equipped with a brake release unit.
NoteAction
Note
If the robot is not connected to the controller, power
must be supplied to the connector R1.MP according
to the section Supplying power to connector R1.MP
on page 56.
1
DANGER
When releasing the holding brakes, the robot axes
may move very quickly and sometimes in unexpec-
ted ways.
Make sure no personnel is near or beneath the ro-
bot.
2
Continues on next page
Product manual - IRB 1010 55
3HAC081964-001 Revision: B
© Copyright 2022 ABB. All rights reserved.
3 Installation and commissioning
3.3.3 Manually releasing the brakes
 Loading...
Loading...








